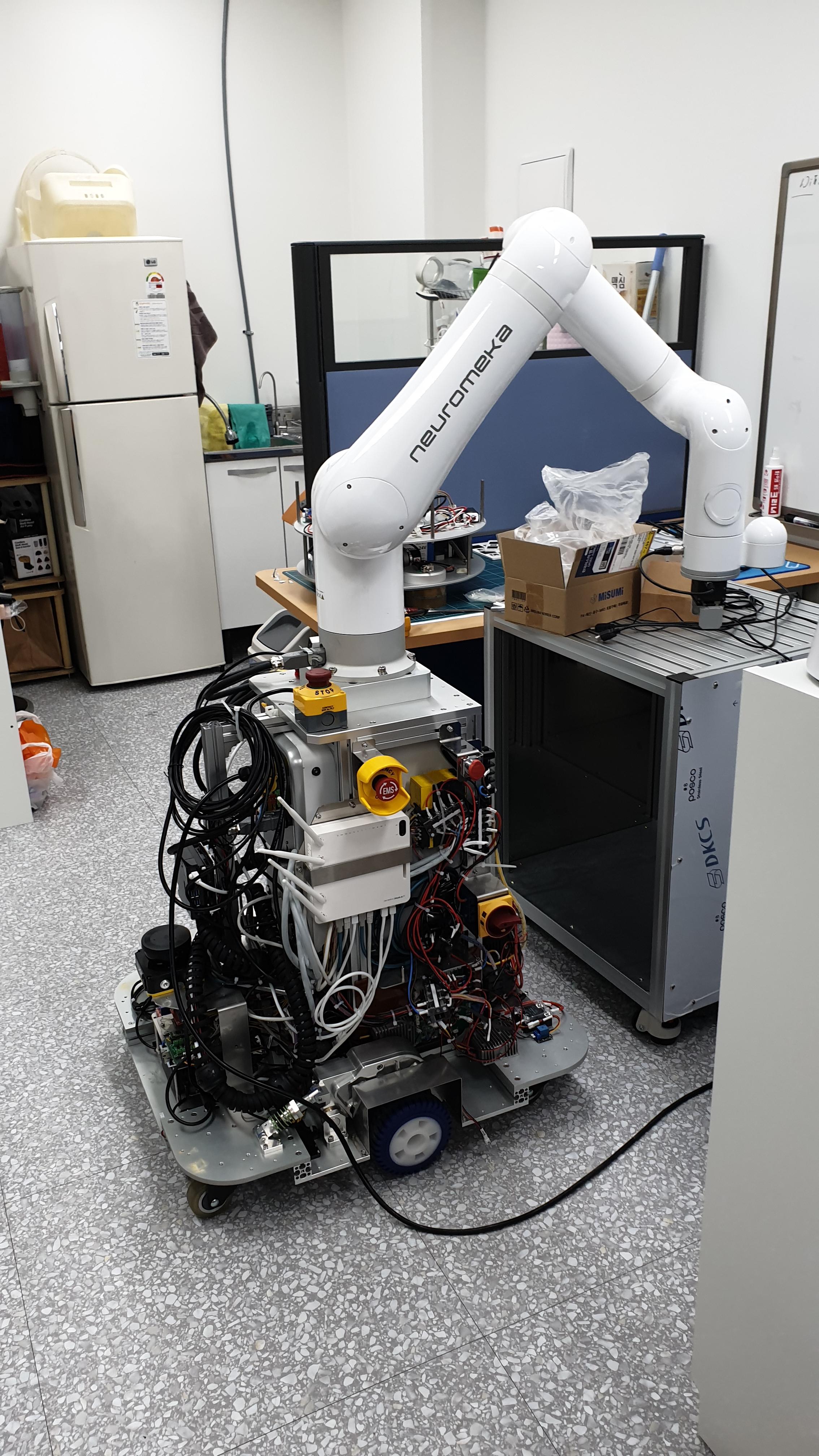
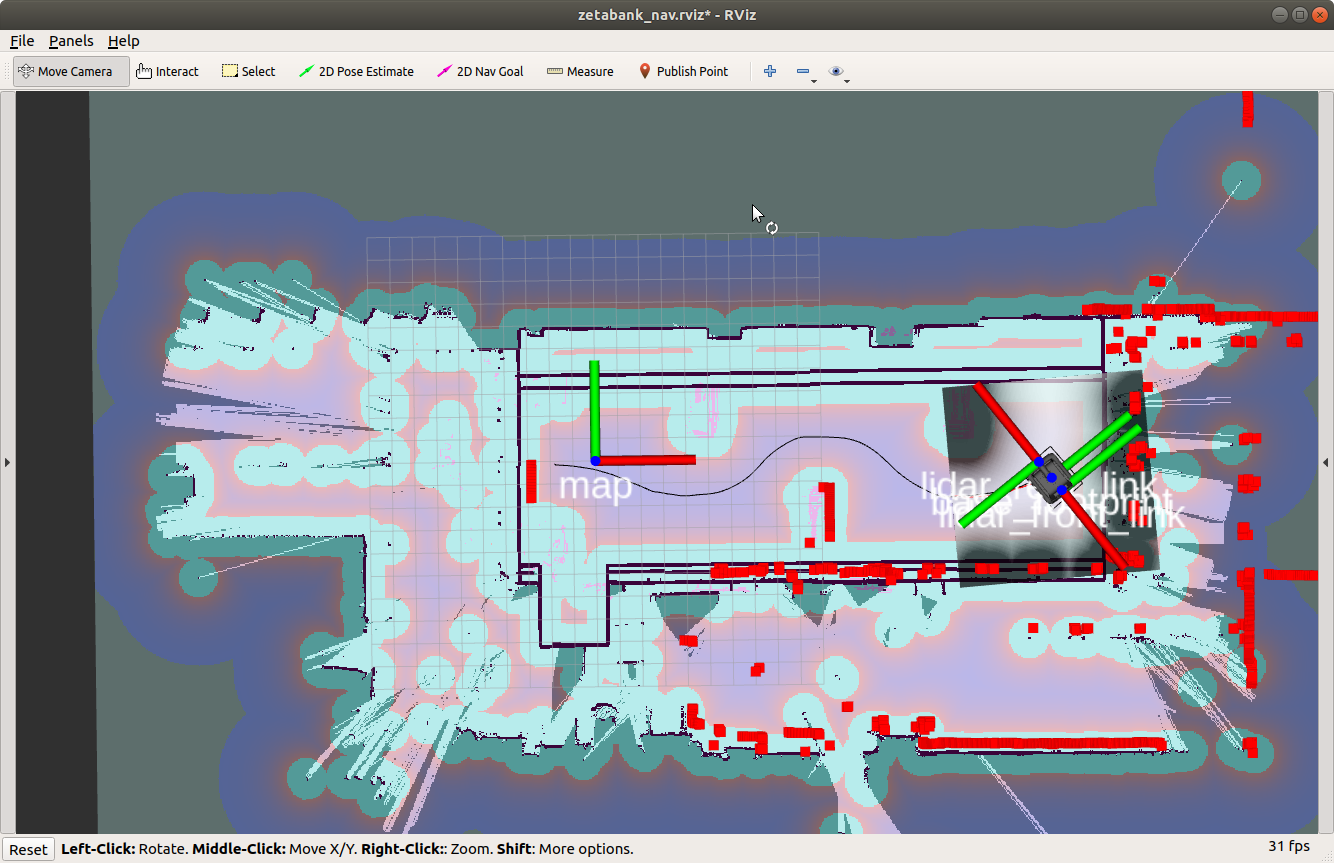
본 제조 협동 로봇은 하단 이동체(Base)와 상단 매니퓰레이터(Manipulator)로 구성된 자율주행 로봇 시스템입니다. 하단부에는 매니퓰레이터 제어기, 배터리, 구동 모터, 각종 제어기 및 센서 보드가 탑재되어 있으며, LRF와 거리 센서를 이용한 맵 작성, 충돌 회피, 자율주행 기능을 수행합니다.
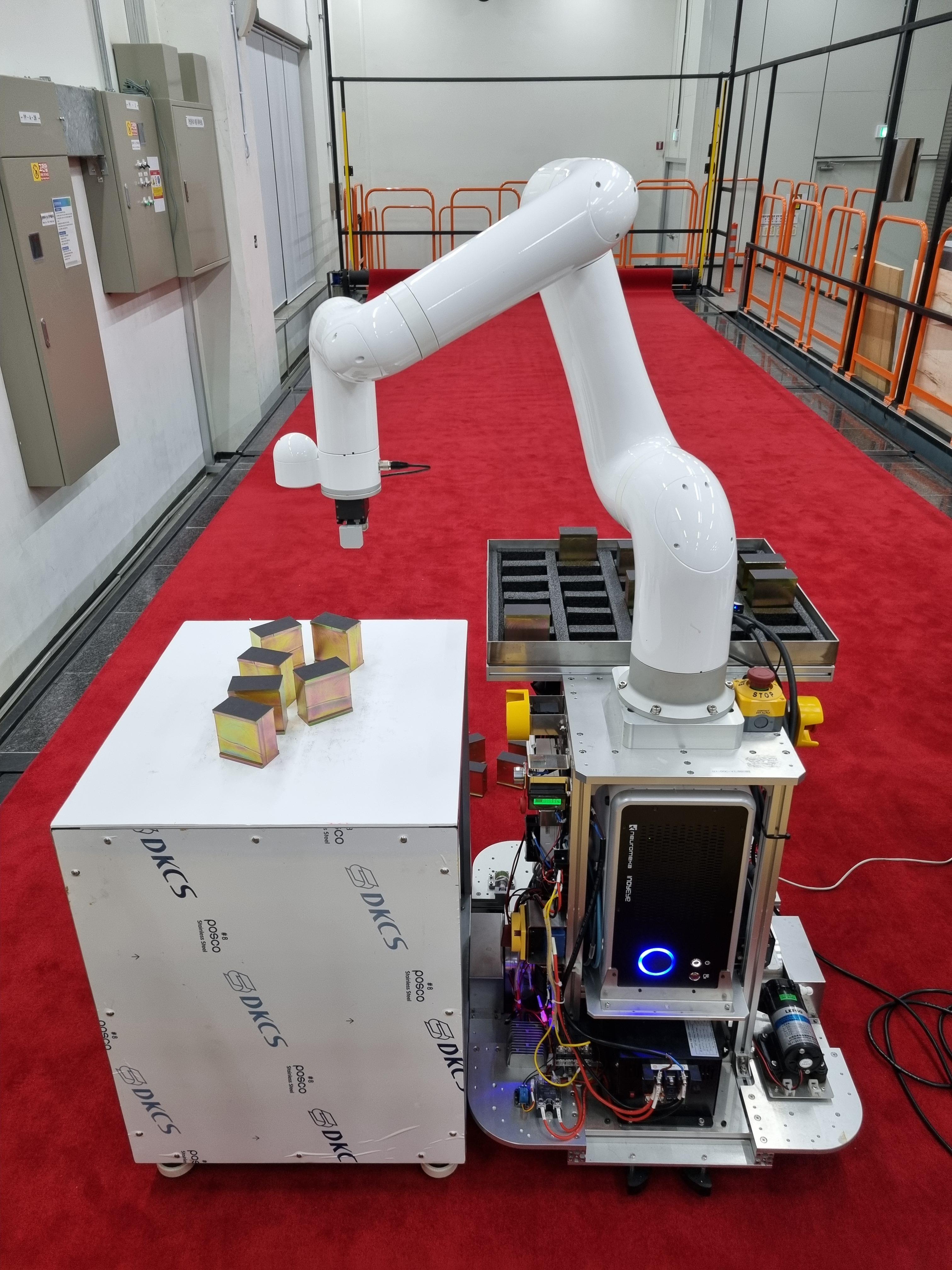
상단부에는 Neuromeka 협동 로봇과 함께 최대 2kg 로드를 적재할 수 있는 팔레트가 장착되어 있습니다. 매니퓰레이터의 말단 장치에는 로드를 파지할 수 있는 그리퍼가 장착되어 있으며, 말단 상단에 설치된 카메라를 이용하여 로드의 위치 및 회전 각도를 인식합니다.
본 로봇은 30kg 이상의 로드를 적재한 상태에서도 18도 이상의 경사면을 주행할 수 있도록 설계되었습니다. 2kg 로드가 무작위로 섞여 있는 환경에서도 카메라 비전 시스템을 통해 각 로드의 위치와 자세를 인식하고, 매니퓰레이터 그리퍼로 집어 로봇 상단 팔레트에 자동으로 적재합니다.
또한, 본 시스템은 한국로봇산업진흥원(KIRIA) 인증시험을 통해 성능 검증을 완료하였습니다.
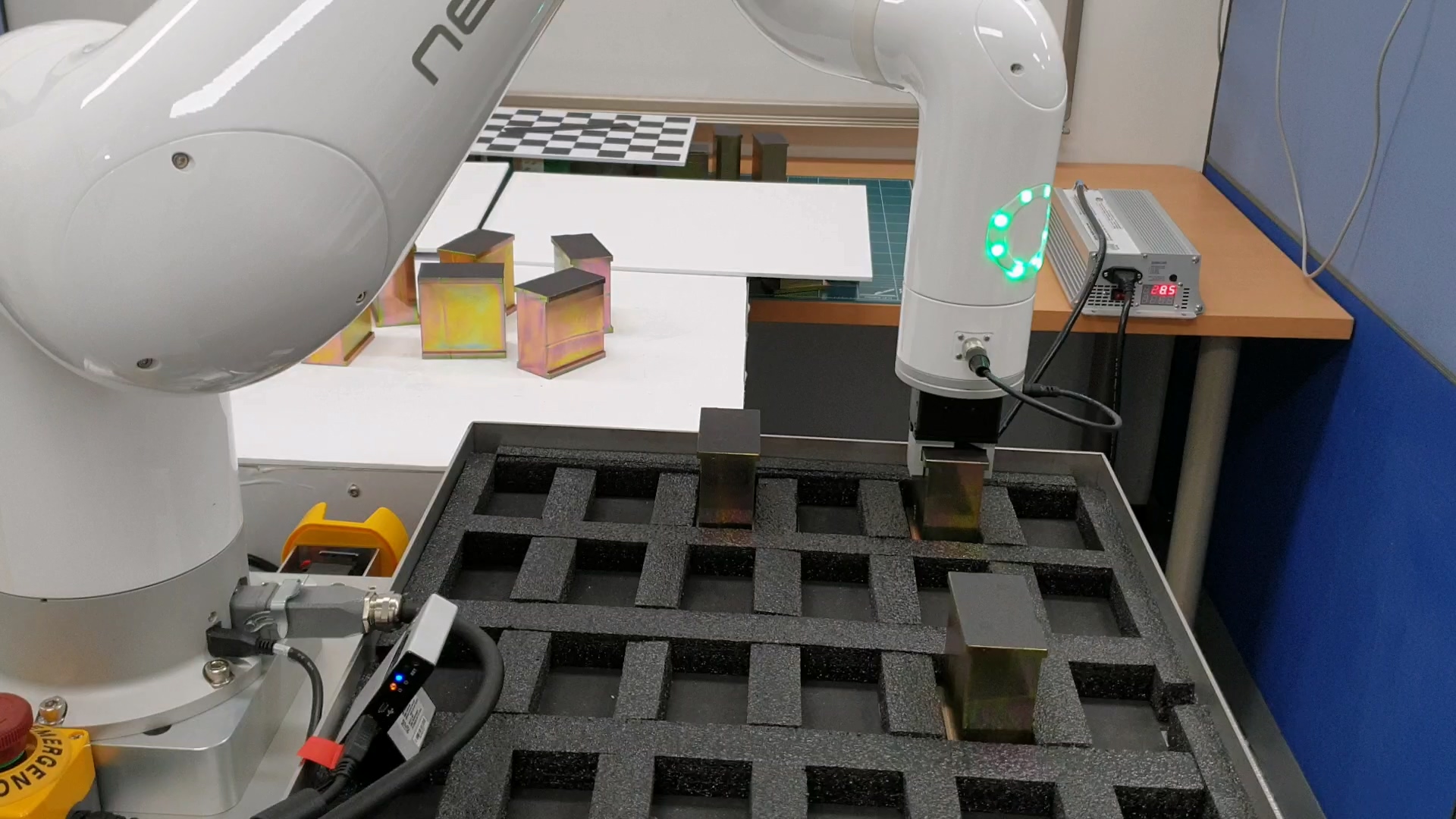
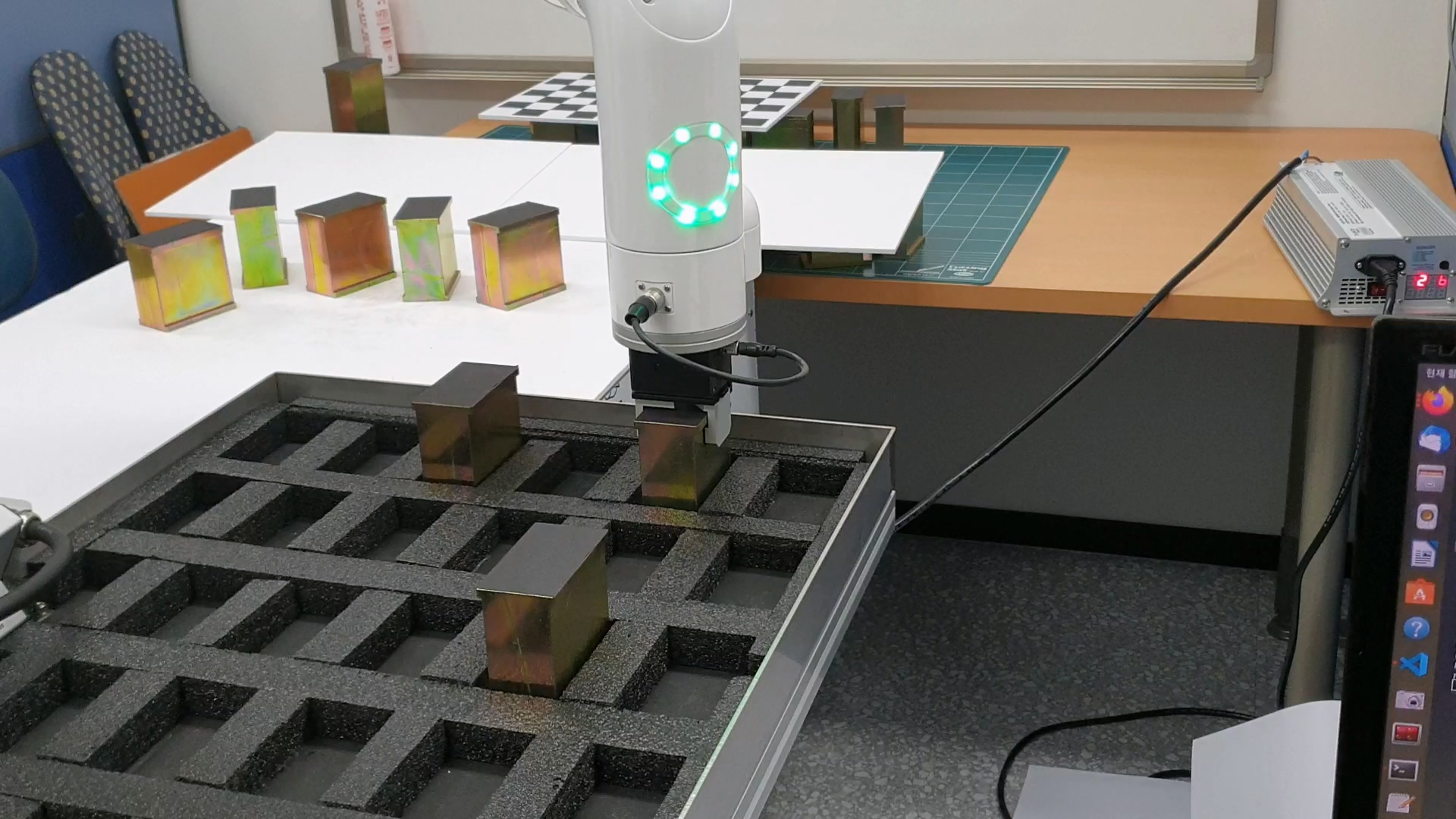
사무실 테이블에 2kg 로드를 다양한 각도로 1개를 놓아 두고 말단 장치에 설치된 그리퍼를 이용하여 집어 들어서 오른쪽으로 이동한 후에 내려놓는 테스트를 수행하면서 알고리즘을 개발하였습니다.

아래의 그림은 매니퓰레이터 옆에 팔렛트를 장착한 모습입니다.

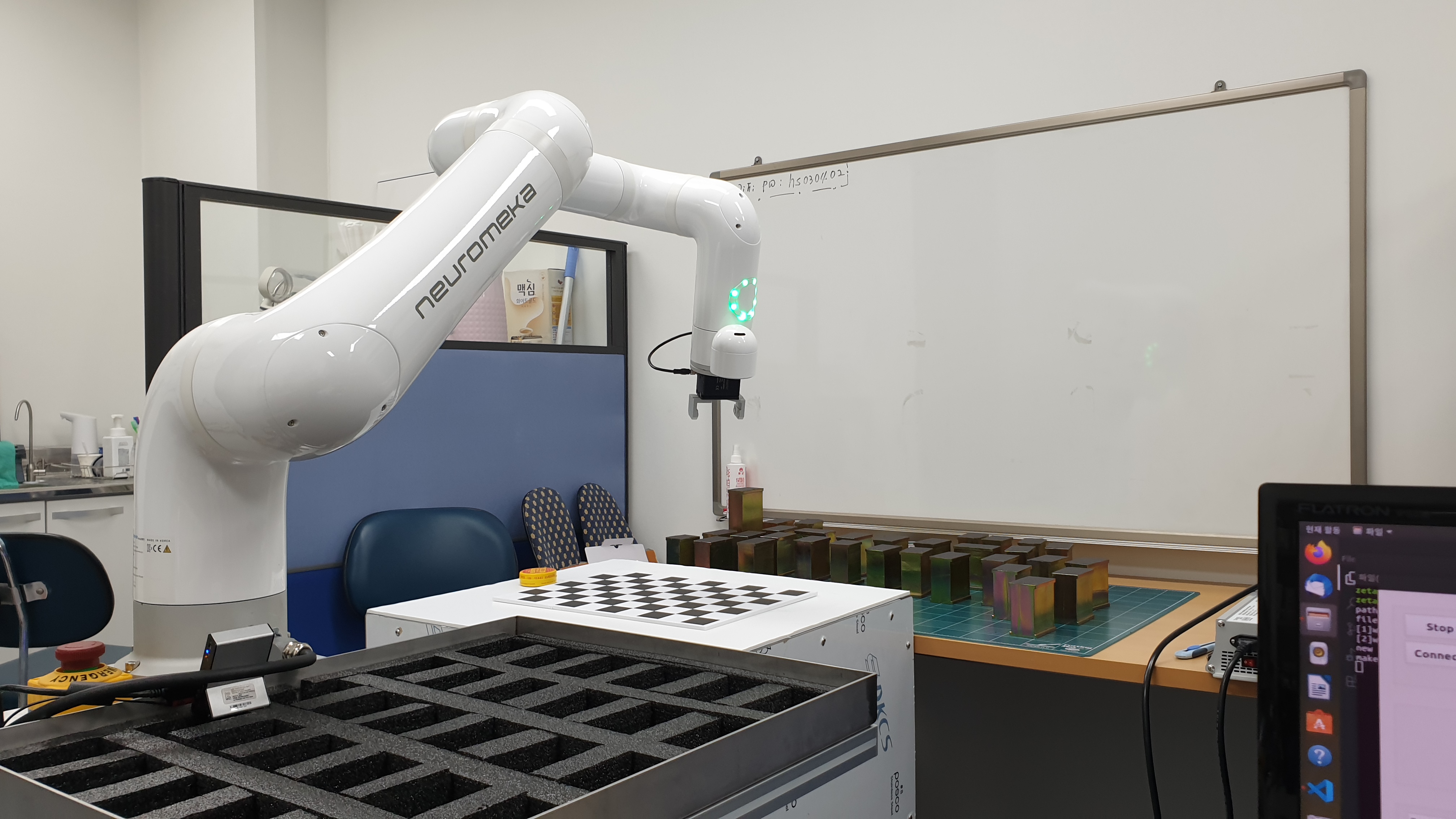
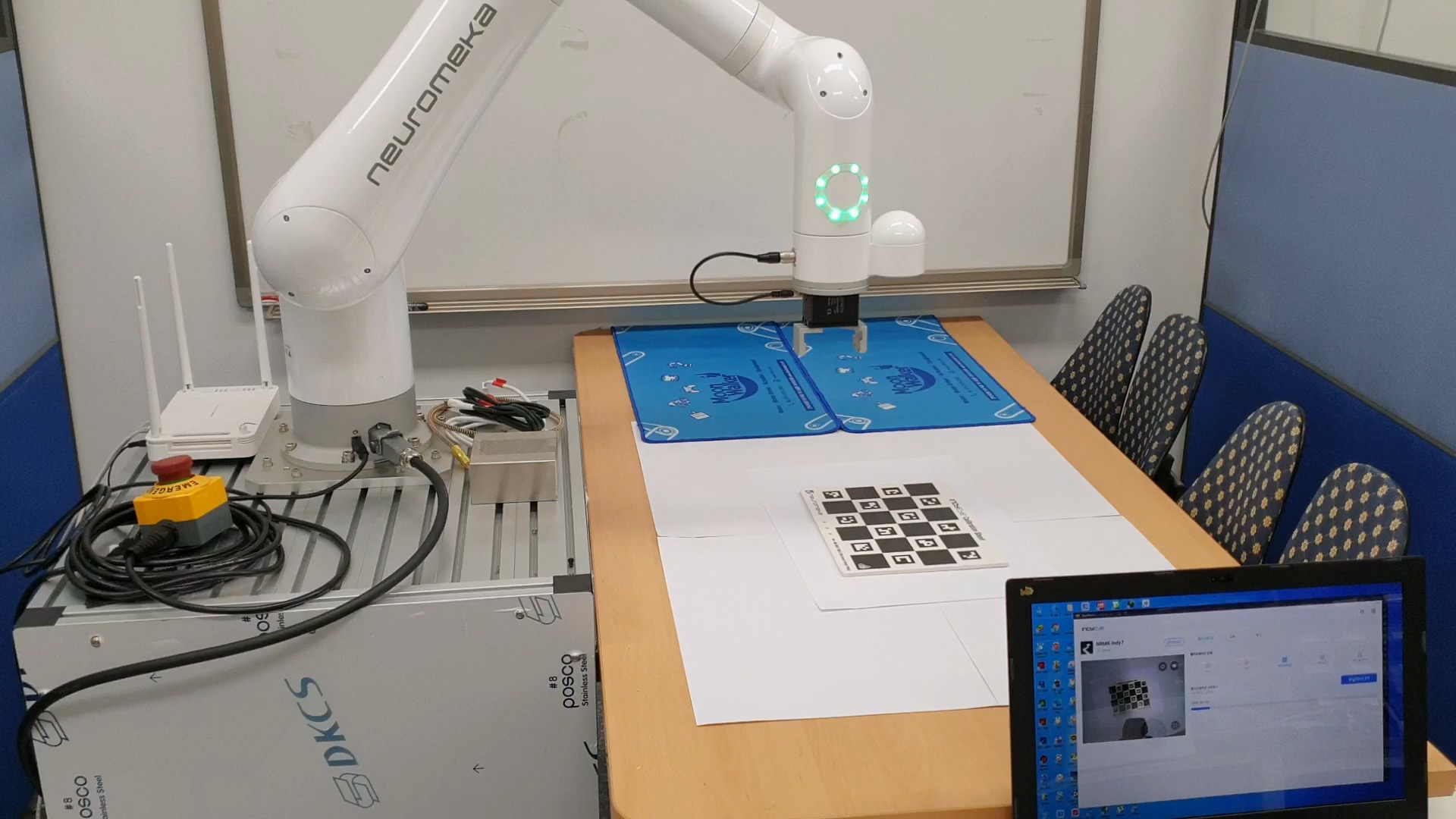
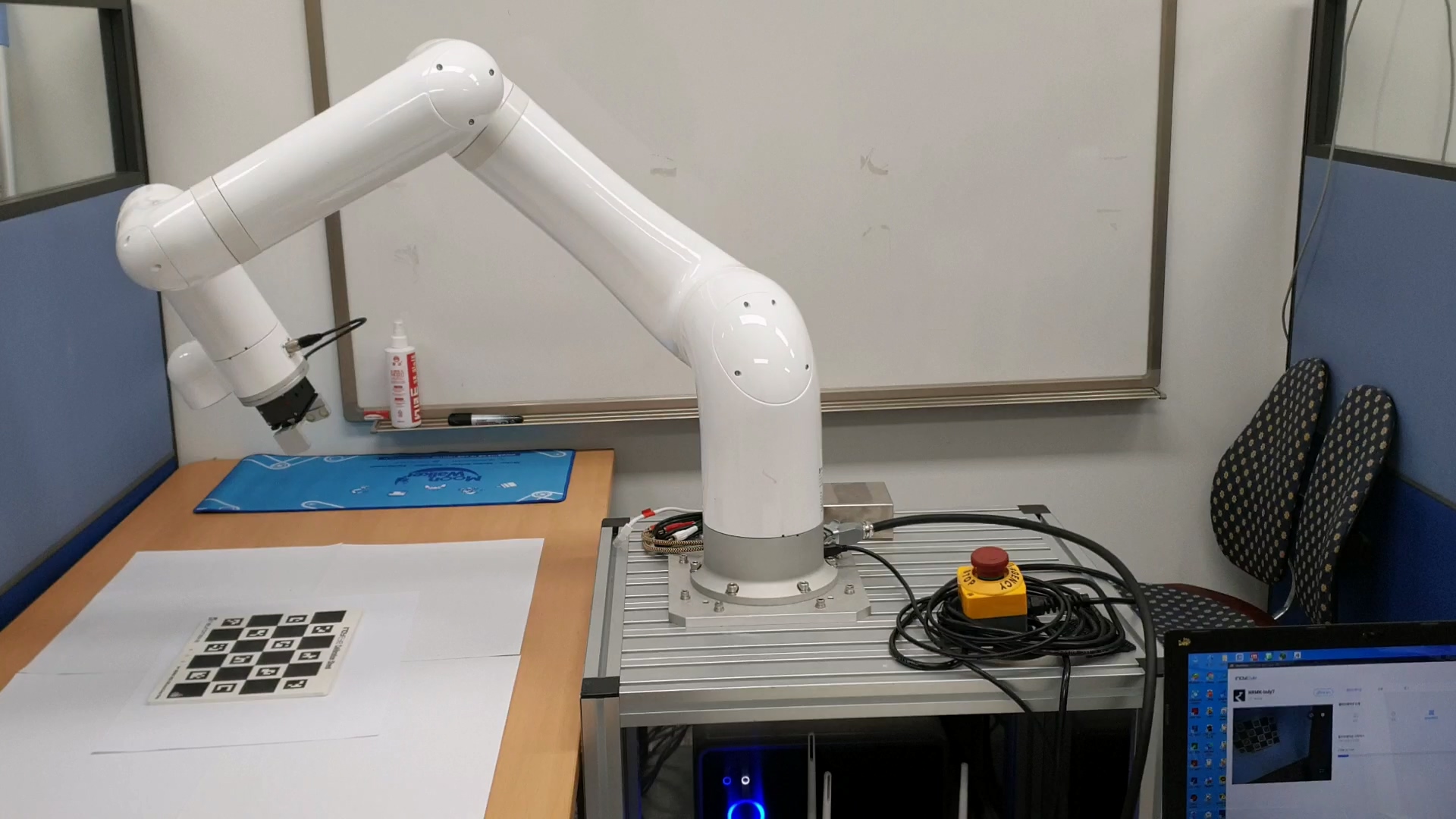
아래의 그림은 매니퓰레이터 말단에 설치된 카메라의 보정을 위해 체커보드를 사용하고 있습니다. 3차원 공간 정보를 보정하기 위해 ArUco 마커 기반 체커보드를 사용하고 있습니다.

카메라 보정을 진행하고 있습니다.

매니퓰레이터 제조사인 뉴로메카에서 제공하는 프로그램을 이용하여 캘리브레이션을 수행할 수 있습니다.

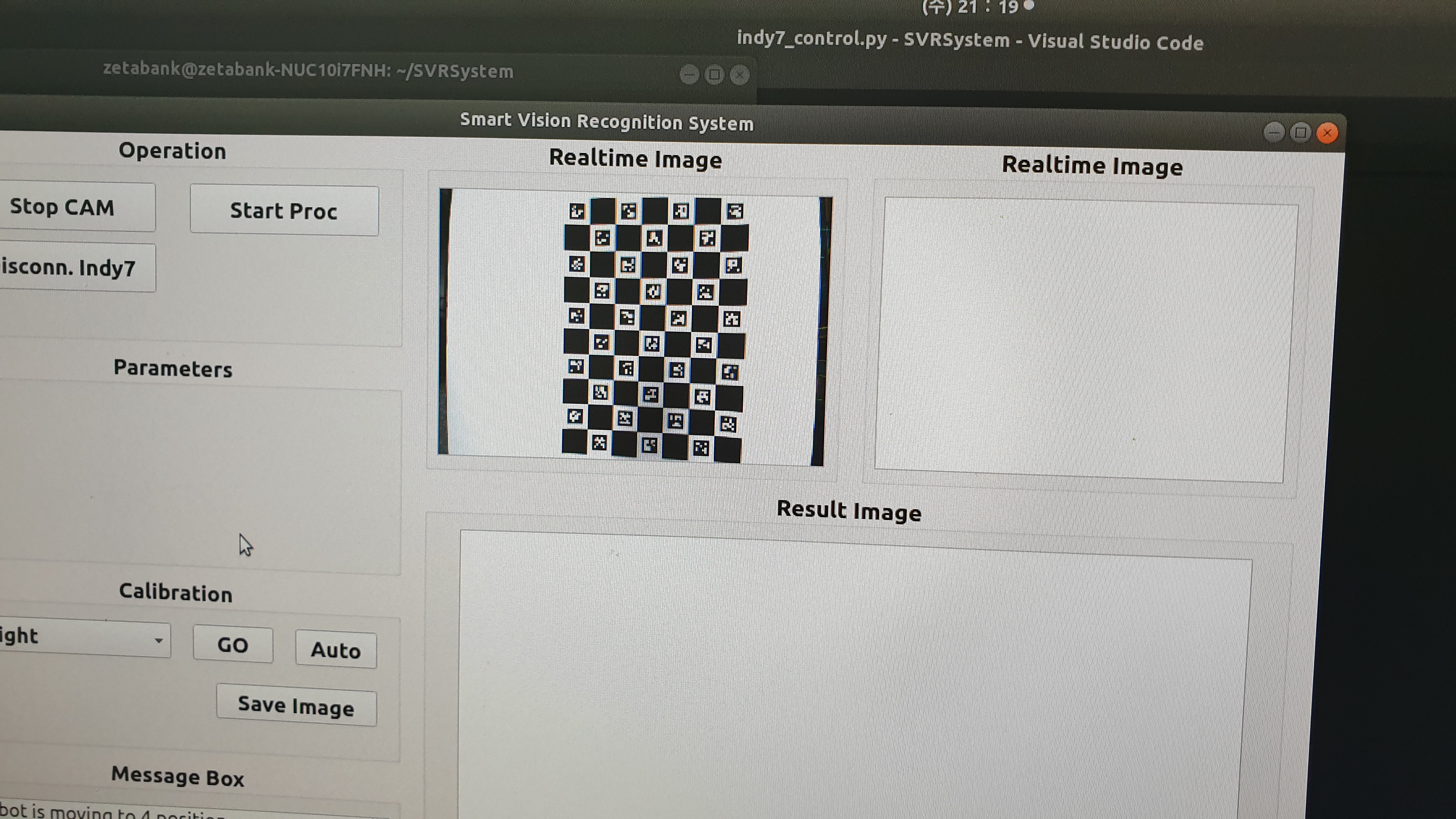
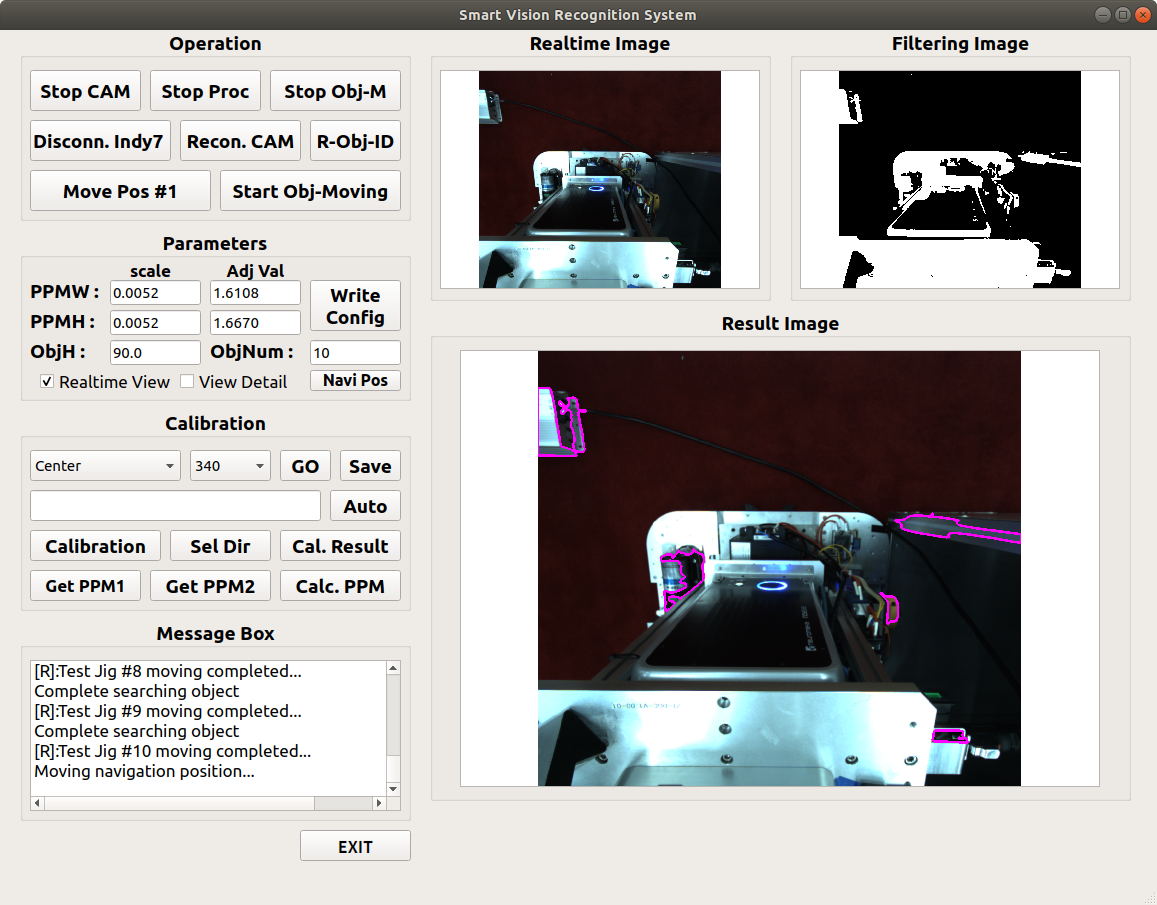
pyQT를 이용하여 GUI 프로그램을 개발했고 카메라 캘리브레이션 알고리즘을 실행하는 화면입니다.
다양한 모양의 로드 상단에 회전 각도를 쉽게 판별하기 위해 2개의 노란색 점을 붙였습니다.

인식 테스트 결과 상단의 부착한 점의 효과가 별로 없어서 제거한 후에 사용했습니다.

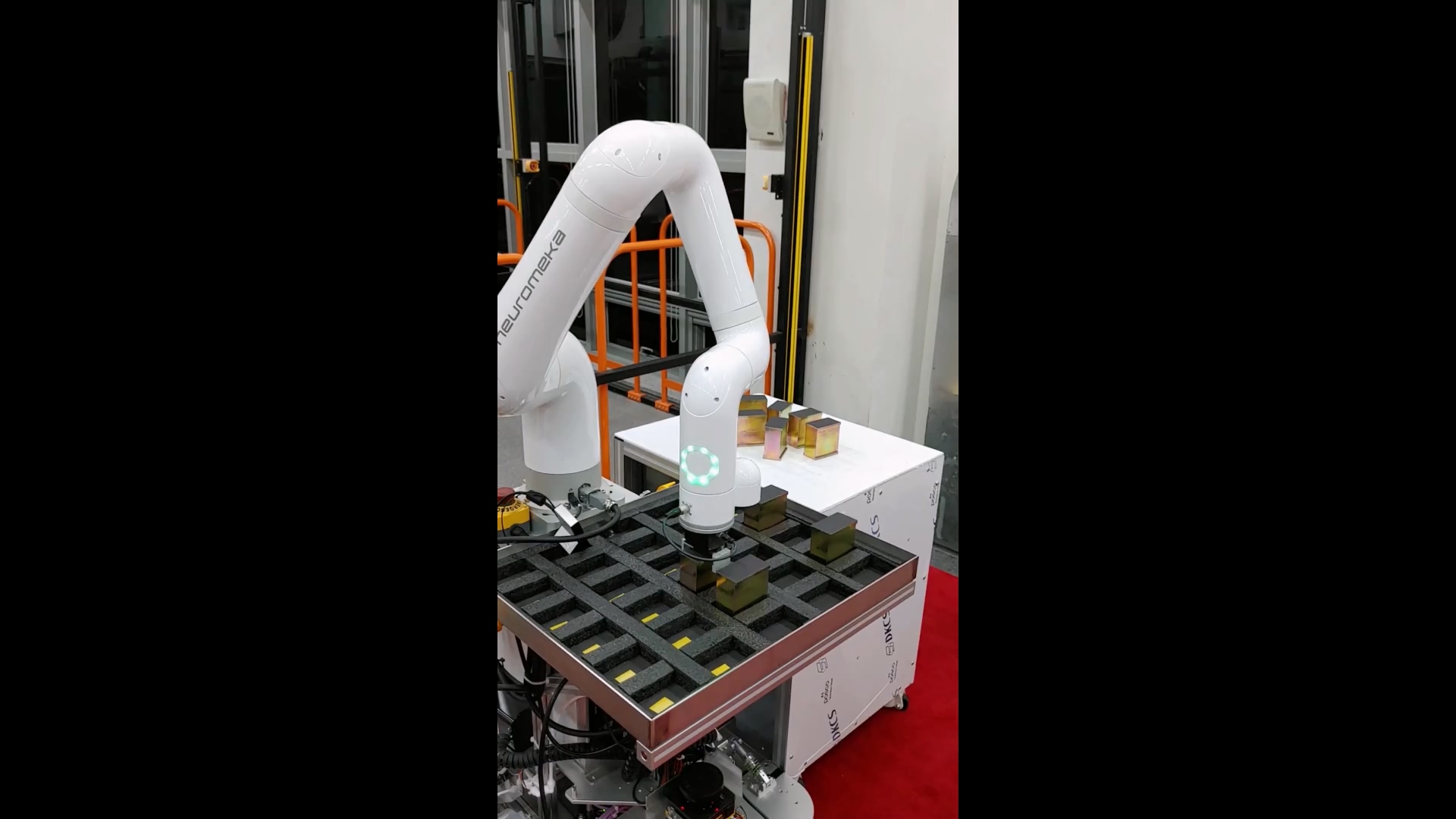
20개 정도의 로드를 배치하고 이동시키는 구동 테스트를 수행하고 있습니다.
아래의 그림은 대구에 있는 한국로봇산업진흥원의 인증 시험 장소에서 로봇의 구동 테스트를 수행하고 있습니다.

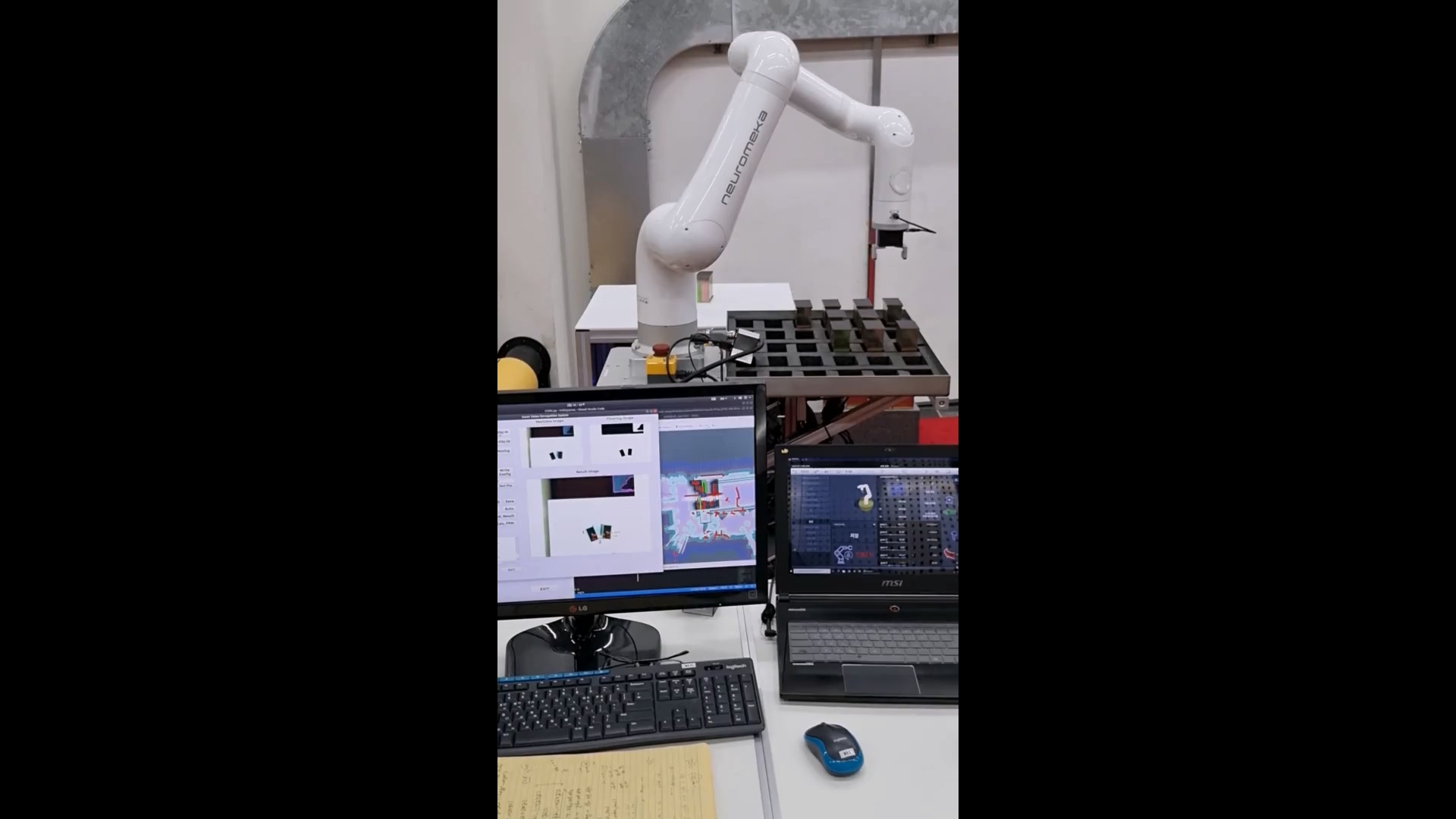
아래의 그림은 스마트 비전 인식 프로그램의 실행 결과입니다.









본 시스템은 한국로봇산업진흥원(KIRIA) 인증시험을 통해 성능 검증을 완료하였습니다.
본 시스템은 체커보드를 이용하여 매니퓰레이터 말단에 장착된 카메라 보정을 수행합니다. 특히 정확한 3차원 인식을 위해 공간 보정(3D 캘리브레이션)도 함께 수행됩니다.
3차원 캘리브레이션은 실물 측정 기준물을 사용하여 정밀하게 보정을 수행하였으며, 카메라 보정 절차는 자동으로 이동 궤적이 생성되어 다양한 방향에서 자동으로 진행됩니다.


이 동영상은 로봇이 특정한 경유점을 자율주행하면서 고정 장애물을 회피하는 테스트를 수행한 것입니다.


로봇의 말단에 장착된 카메라와 AI 알고리즘을 이용하여 물체의 위치와 방향을 인식한 후, 그리퍼를 사용해 물체를 집어 팔레트의 지정된 위치에 순차적으로 적재하는 과정을 검증하는 테스트 영상입니다.
로드의 적재 순서는 자동으로 결정되며, 팔레트의 적재 위치는 사전에 정의된 좌표를 기준으로 수행됩니다.


사무실에서 1개의 로드를 이용하여 다양한 방향에서 로드의 위치와 방향을 인식하고 그리퍼로 잡고 특정한 장소로 이동시키는 일련의 과정을 테스트했습니다.



알고리즘 개발과정에서 사무실에서 다수의 로드를 팔렛트에 옮기는 테스트를 수행했습니다.