산업 현장에서 사용되는 산업용 로봇의 안전성을 체계적으로 검증하기 위한 산업용 로봇 안전검사 프로그램 개발 과정을 중심으로 내용을 구성하였습니다.
고속 동작, 반복적인 정밀 동작, 비정형 궤적 움직임은 생산성과 효율을 높이는 핵심 요소이지만, 동시에 작업자 안전 측면에서는 정량적이고 과학적인 검증이 필수적입니다.
해당 안전검사 솔루션은 고해상도·고속 모션 분석 기술을 활용하여 로봇의 실제 동작을 정밀하게 계측하고, 속도, 가속도, 궤적, 정지 응답 특성 등의 데이터를 분석함으로써 안전 기준 충족 여부를 평가하도록 설계되었습니다. 단순한 이론적 시뮬레이션이 아닌, 실제 구동 데이터를 기반으로 분석함으로써 산업용 로봇의 잠재적인 위험 요소를 사전에 식별하는 데 목적을 두고 있습니다.
또한 국제 안전 규격과 산업 현장의 검사 요구사항을 반영하여, 안전 펜스 내·외부 동작 구간, 비상정지 시 응답 특성, 반복 동작에 따른 오차 누적 등 실무 중심의 검사 시나리오를 지원합니다. 이를 통해 개발된 안전검사 시스템은 로봇 제조사, 시스템 통합업체, 그리고 현장 운영자가 모두 활용할 수 있는 실질적인 안전 검증 도구로 활용됩니다.
영상에서는 안전검사 시스템의 설계 개념부터 고속 모션 데이터 수집 방식, 분석 알고리즘, 그리고 실제 산업용 로봇 적용 사례까지 단계적으로 소개합니다. 산업용 로봇의 안전성을 보다 정확하고 신뢰성 있게 확보하고자 하는 분들에게 실무적인 기준과 방향성을 제시하는 것을 목표로 합니다.






1. 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #1
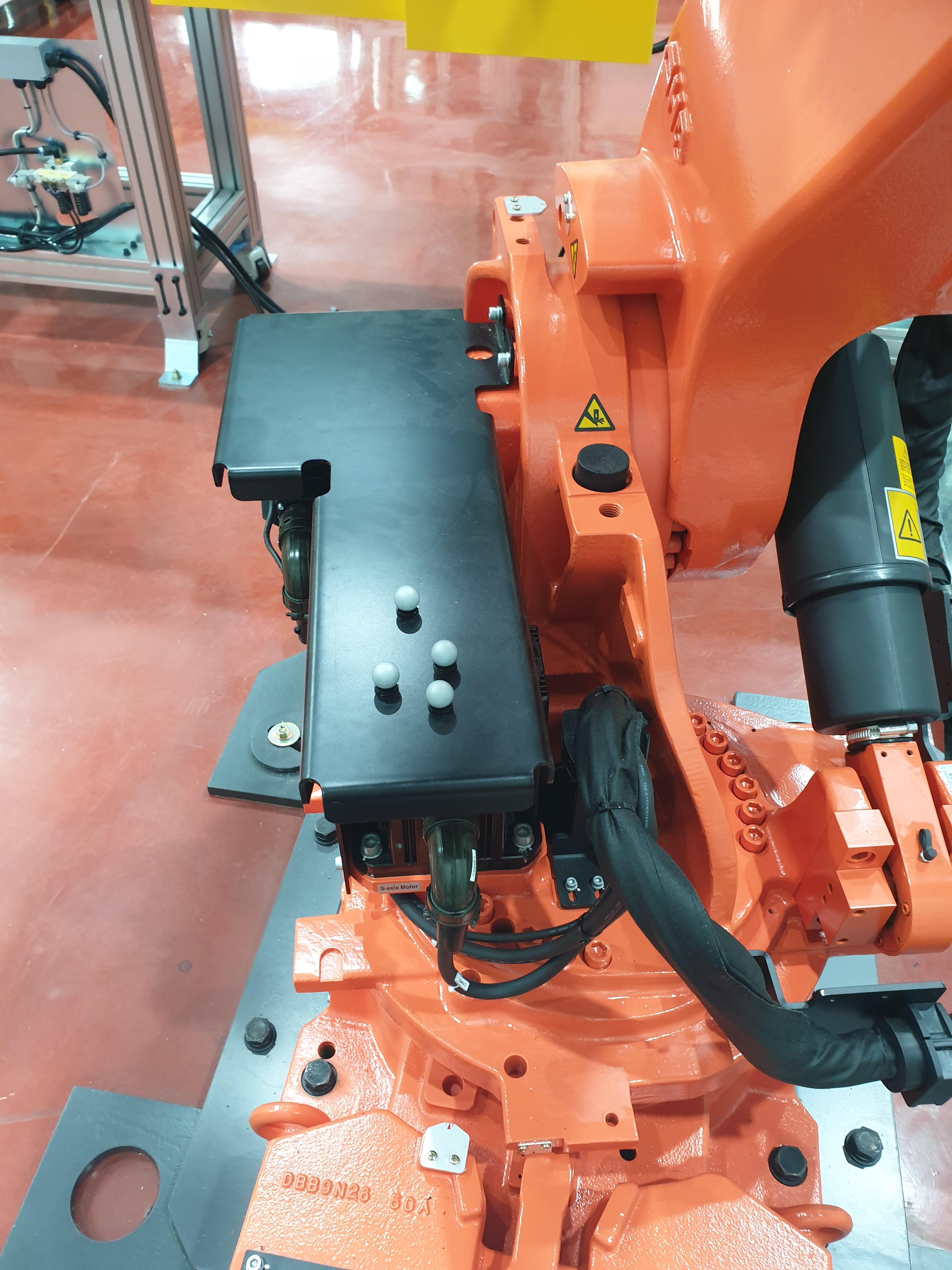
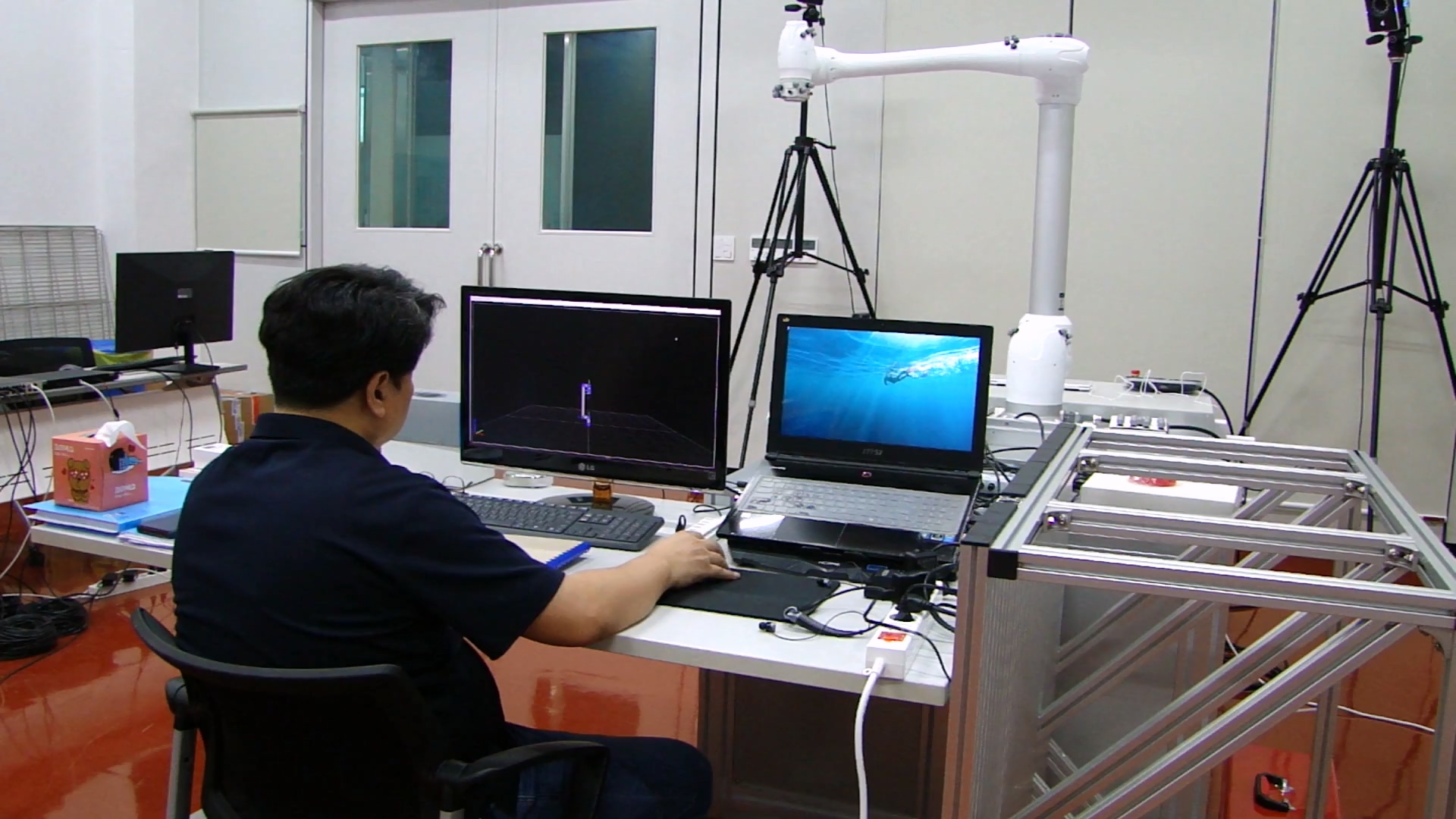
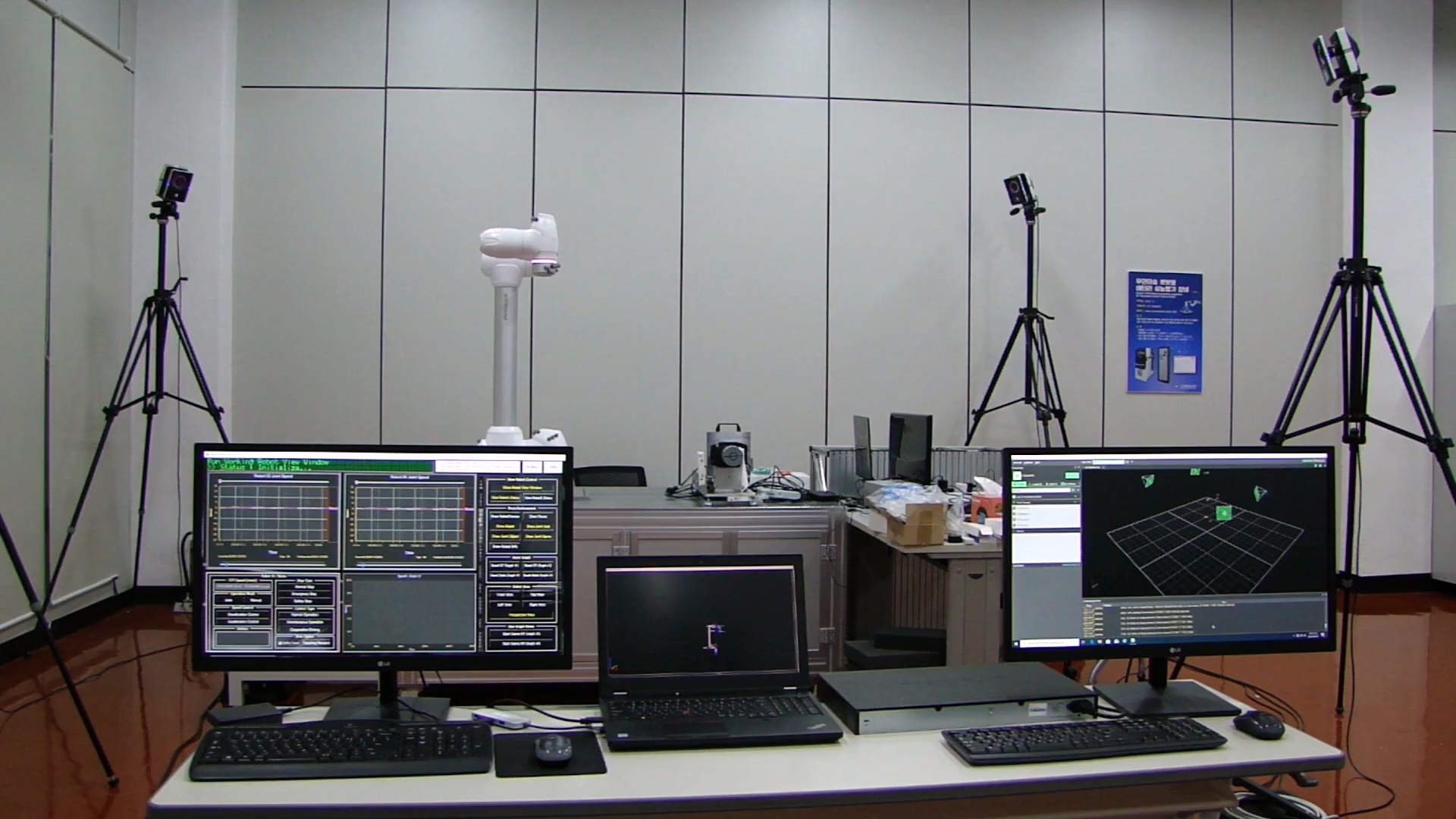
로봇 매니퓰레이터에 마커를 부착한 후, 3D 카메라 설정 프로그램을 사용하여 해당 마커를 등록하고 로봇의 이동 경로를 화면에 시각적으로 출력하는 프로그램을 개발하였습니다.

동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #1
2. 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #2

동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #2
3. 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #3
동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #3
4. 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #4
동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-3D 카메라 개발 환경 구축 #4
5. 산업용 로봇 안전검사 프로그램 개발-현장 실시간 개발 작업 #1

동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-현장 실시간 개발 작업 #1
6. 산업용 로봇 안전검사 프로그램 개발-현장 실시간 개발 작업 #2

동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-현장 실시간 개발 작업 #2
7. 산업용 로봇 안전검사 프로그램 개발-현장 실시간 개발 작업 #3

동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-현장 실시간 개발 작업 #3
8. 산업용 로봇 안전검사 프로그램 개발-3D 카메라 캘리브레이션

동영상 링크 : 산업용 로봇 안전검사 프로그램 개발-3D 카메라 캘리브레이션
