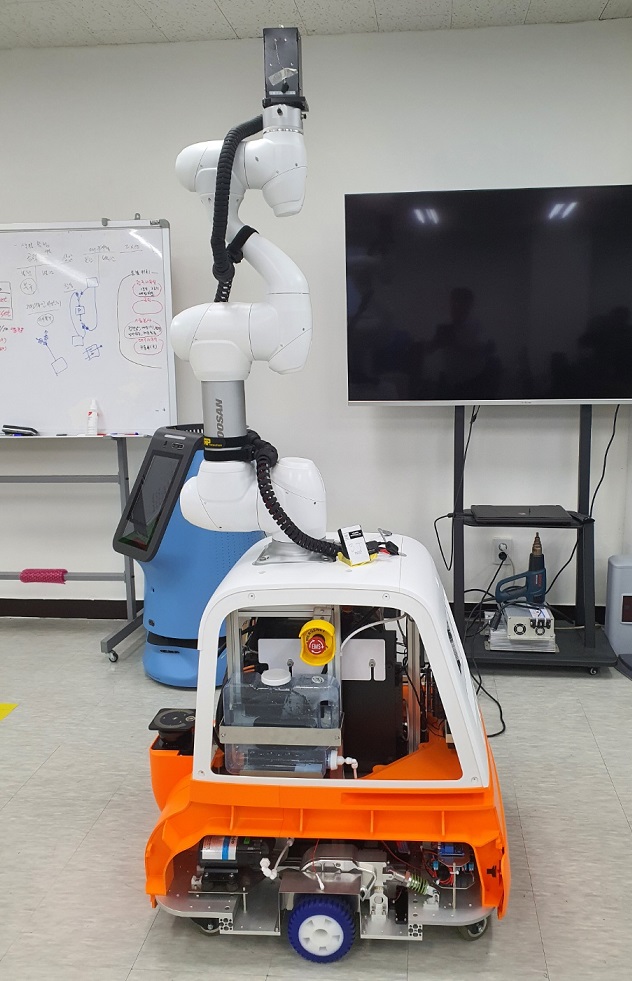
협동로봇은 이동 로봇 몸체 상단에 로봇 팔을 부착하고 팔 끝단에는 UV 살균기와 소독액 분사기를 장착하여 방역이 가능하도록 설계한 로봇입니다. 로봇 몸체 내부에는 소독액을 저장하는 통이 내장되어 있고, 바닥에는 UV 사귤기가 내장되어 있어 주행 시 바닥을 살균할 수 있습니다.
아래의 그림은 협동로봇의 1차 테스트 버전입니다.

내부에 소족액통이 장착되어 있습니다.

로봇 상단에 설치된 로봇 팔은 가반하중이 10Kg인 두산 로보틱스의 M1030 모델입니다.
M1013 : 제품 : 제품 & 솔루션 : 두산로보틱스
협동로봇, M-시리즈의 M1013 제품은 가반하중 10kg, 작업반경 1,300mm, 반복정밀도 ±0.05mm을 제공합니다.
www.doosanrobotics.com
로봇 디자인, 각종 제어 보드 및 센서 보드 설계 및 제낙, 기구부 설계 및 제작, 초기 프로그램 구조 확정은 제타 위성 로보틱스에서 당담했습니다.
제타뱅크 | 우리 일상을 바꾸는 스마트 도우미
2018. 10. 31. (로봇성능)최대속도, 평균속도, 경사로 주행, 이동 정확도, 장애물 주행, 최대 하중 탑재 후 주행
zetabank.co.kr
저는 ROS 기반 센서 데이터 취즉, 라이다 센서 정보 처리, 로봇 팔 제어, 소독액 분사, 모터 제어 등 로봇 주행과 서비스 시나리오 개발 업무를 담당했습니다.

사무실에서 먼저 로봇의 프레임을 조립하고 로봇팡릉 부착한 후 전장 작업을 진행하여 로봇이 움직일 수 있도록 작업한 후에 기본 구동 테스트를 수행했습니다.

제작한 케이스 일부를 조립한 로봇입니다.

대구 시청 별관 1층 복도에 설치된 지문인식기와 회의실 내부를 협동로봇을 이용하여 방역을 수행하는 작업을 진행했습니다.
아래의 사진은 1층 복도입니다.

아래의 사진은 회의실 내부입니다.

아래의 사진은 복도에 설치된 지문인식기 입니다.

대구시청에서 시청 별관 1층 후문 입구에 작업공간을 마련해주셔서 작업은 진행하게 되었습니다. 겨울에는 문이 열리면 추운 바람이 들어와 많이 힘들었던 기억이 생생합니다.

아래의 사진은 임시 작업 테이블에서 프로그래밍 작업을 하고 있는 모습입니다. 테이블 옆에는 로봇이 세워져 있습니다.


대구 시청 별관 후문 입구에 작은 공간이 있는데 여기 벽에 지문인식기 그림을 붙여 놓고 로봇팔의 동작 시나리오를 개발했습니다. 그리고 주행 테스트도 진행했습니다.
1층 대회실에는 두 줄로 테이블이 배치되어 있으며, 로봇의 방역 임무는 이 테이블 위와 회의실 바닥을 소독하는 것이었습니다. 로봇 팔 끝에는 소독액 분사 장치가 장착되어 있으며, 소독액 통과 연결된 분사 기구를 통해 소독액을 분사합니다. 특정 면적(테이블 위나 바닥)을 방역하기 위해서는 로봇이 이동하면서 로봇 팔이 좌우로 움직여야 합니다. 따라서 테이블 위와 바닥을 효과적으로 방역하기 위해서는 두 가지 유형의 로봇 팔 이동 궤적이 필요하며, 이를 다양한 방법으로 구현하였습니다.


회의실 방역 시나리오를 완성하고 테스트를 수행했습니다.
배터리 전압이 일정 수준 이하로 떨어지면, 로봇은 자동 충전 알고리즘을 통해 충전기를 탐색합니다. 이후 저속으로 충전기 위치로 접근한 뒤, 후진하여 충전 단자에 접속함으로써 배터리를 충전합니다.
아래 그림은 로봇에 사용되는 충전기의 모습입니다.
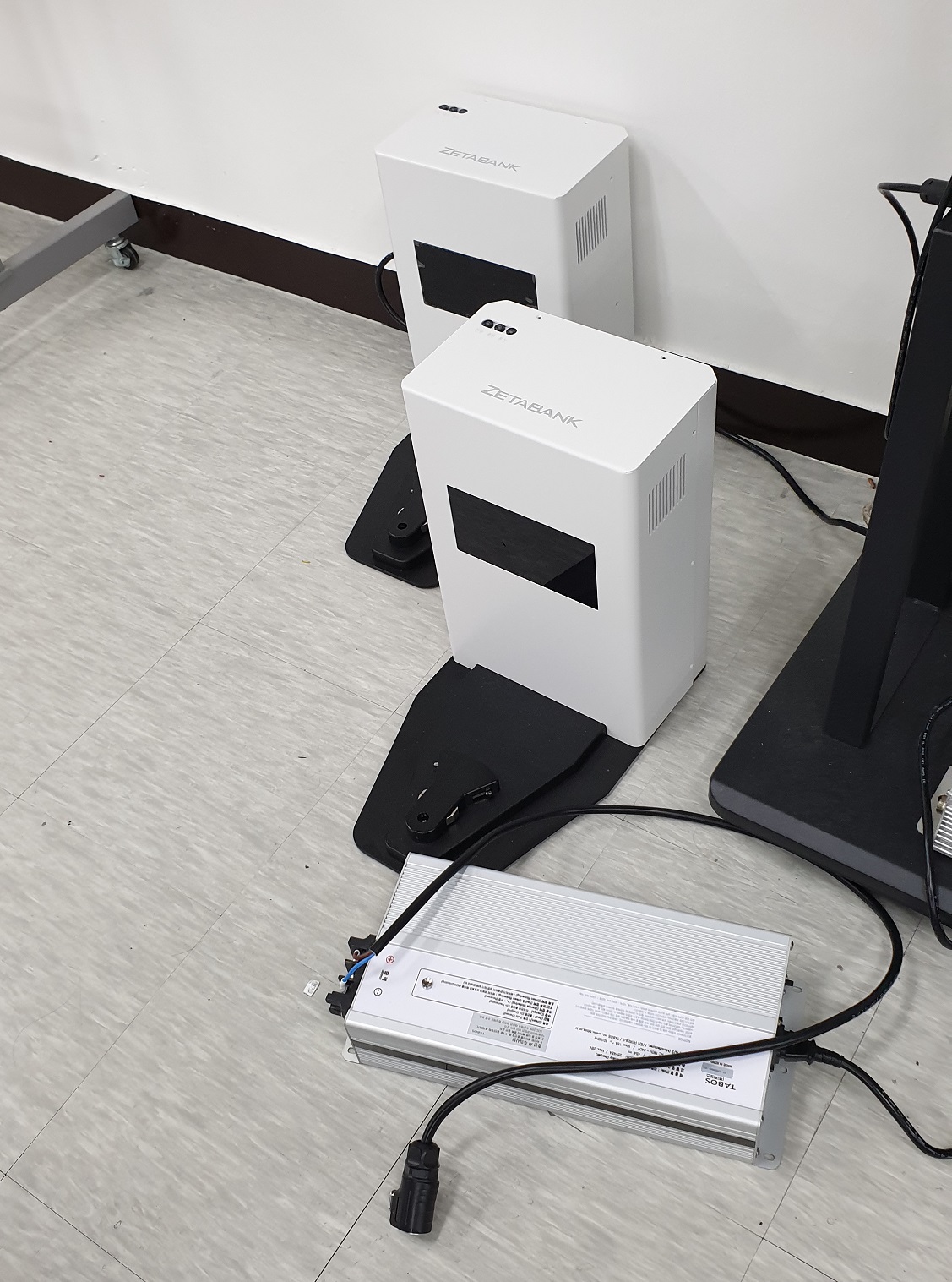
나중에 충전소를 만들어 설치하기도 했습니다.

1층 복도에 설치된 지문인식기를 대상으로 방역 시나리오를 개발하고 테스트를 수행하였습니다. 로봇은 복도를 주행하다가 지문인식기 위치에 도달하면 정지한 뒤, 위치에 따라 로봇 팔을 적절히 전개하여 지문인식기에 말단을 밀착시킵니다. 이후 UV 살균기를 작동시켜 일정 시간 동안 유지하여 살균을 수행합니다. 살균이 완료되면 UV 램프를 끄고 로봇 팔을 원위치로 접은 후 다시 주행을 이어갑니다.
복도에는 총 4개의 지문인식기가 설치되어 있으며, 로봇은 이를 순차적으로 모두 살균합니다. 모든 살균 과정을 마친 후에는 자동 충전 알고리즘을 실행하여 충전기 위치로 이동하고, 후진으로 안착하여 충전을 진행합니다.


'로봇 개발 사례 > 협동 로봇' 카테고리의 다른 글
| 협동 로봇 개발 사례 #2 (1) | 2025.08.26 |
|---|
