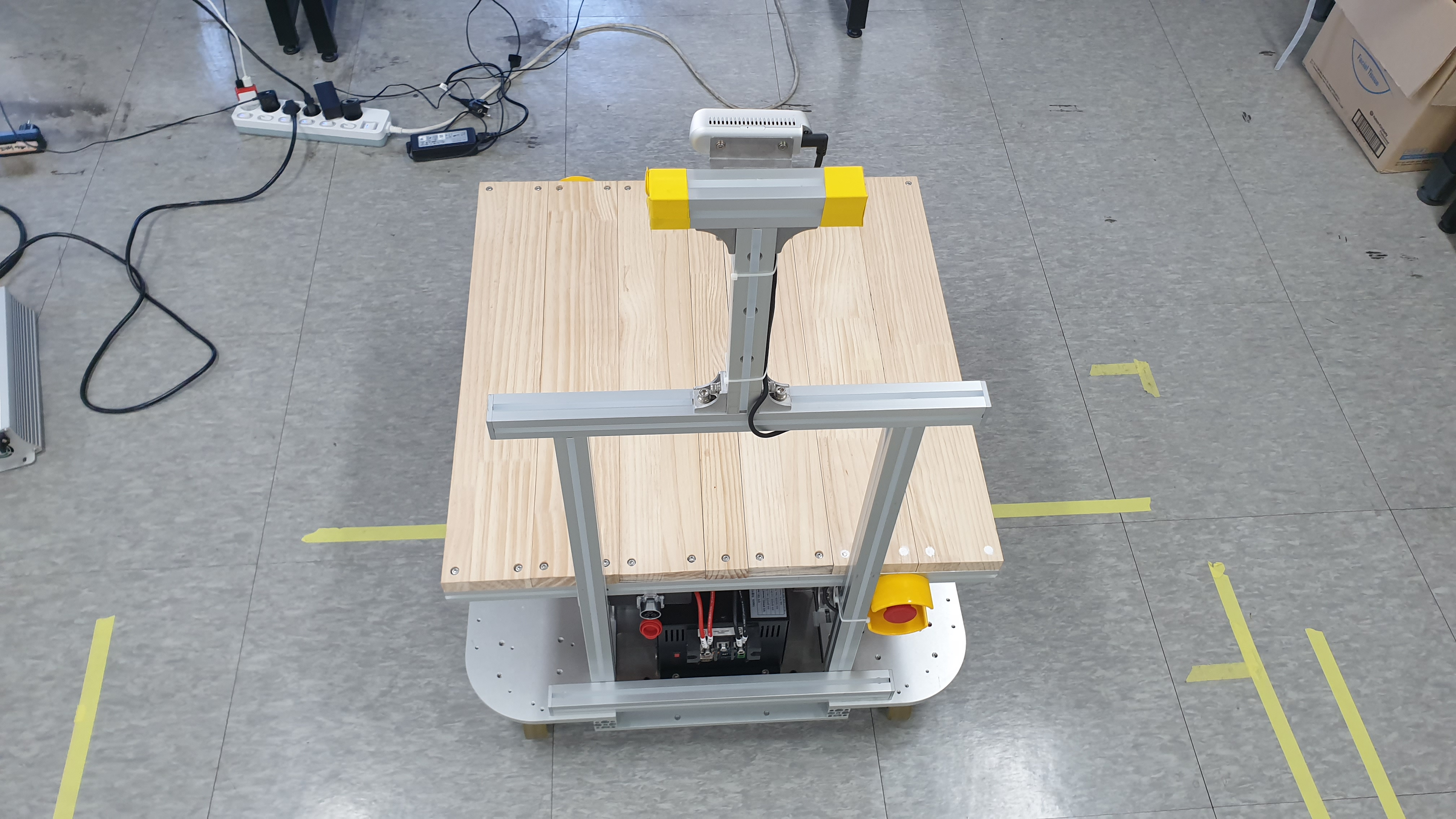
농업용 운반 로봇은 두 바퀴로 주행하며, 지정된 경로를 자율적으로 따라갈 수 있습니다. 주행 중에는 고정 장애물과 이동 장애물을 회피할 수 있으며, 로봇의 카트에는 최대 40kg의 화물을 적재하고 운반할 수 있습니다. 또한 8도 경사로 주행이 가능하며, 최대 주행 속도는 1m/s, 최저 주행 속도는 0.7m/s입니다.
로봇 후면 상단에 장착된 3D 카메라를 통해 사람을 인식하고 추종할 수 있습니다. 사용자가 두 손바닥을 펴서 추종을 지시하면, 로봇은 일정한 거리를 유지하며 사용자를 따라갑니다. 사용자가 회전하면 로봇도 함께 회전하여 주행을 이어갑니다. 본 로봇은 실외 환경에서도 안정적으로 주행할 수 있습니다.
본 시스템은 한국로봇산업진흥원(KIRIA) 인증시험을 통해 성능을 검증받았습니다.
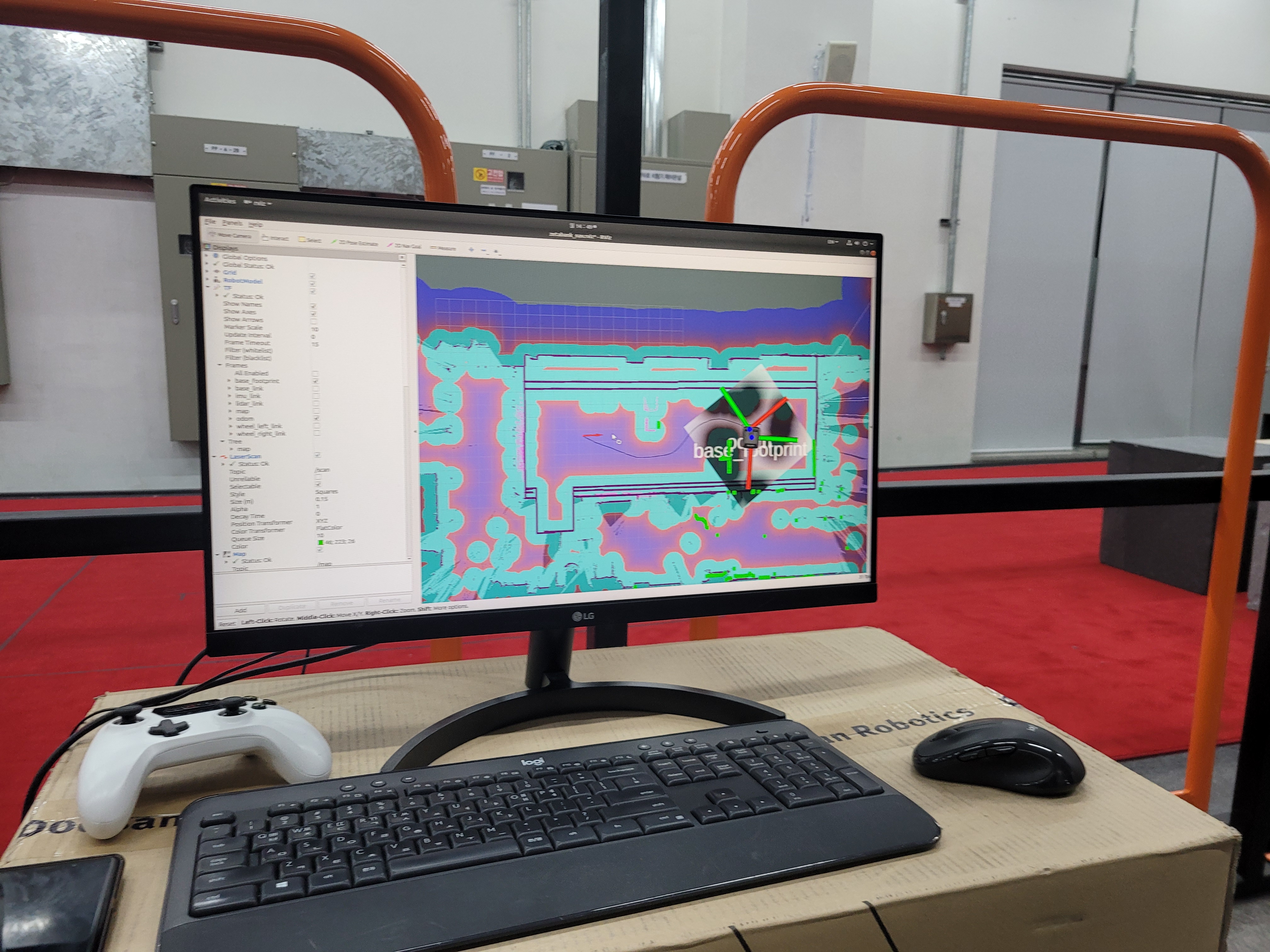
사무실에서 인증시험 전에 구동 테스트를 수행하였습니다.

카트에 화물을 장착하지 않은 상태에서 고정 장애물을 피해 경로점을 자율주행하는 인증시험을 수행하였습니다.



40kg에 해당하는 짐을 카트에 적재한 상태에서 조이스틱을 이용하여 직진주행을 수행하고 주행시 직진성이 유지되는지 여부를 시험하였습니다.






40kg 짐을 싫고 8도 경사를 정상적으로 주행하는 시험을 수행했습니다. 로봇은 조이스틱으로 조종했습니다.






농업용 운반 로봇-적재 상태에서 8도 등판 주행 동영상
조이스틱을 이용하여 직선주행을 수행하고 360도 회전이 정상적으로 가능한지 여부를 시험했습니다.



시험장소의 최대이동 거리를 기준으로 로봇의 속도가 1m/s가 되도록 가속을 수행하고 로봇 카드위에 설치된 센서를 이용하여 속도 도달여부를 확인하는 시험을 수행했습니다.

시험장소의 최대이동 거리를 기준으로 로봇의 속도가 0.7m/s이하로 가속을 수행하고 로봇 카드위에 설치된 센서를 이용하여 로봇의 속도를 측정하여 테스트 조건을 만족하는지 시험했습니다.


사람 추종 주행도 인증시험을 수행했습니다.



사무실에서 안전검사 전에 주행 테스트를 수행했습니다.

야외에서도 로봇을 구동할 수 있습니다. 아래의 사진들은 야외에서 주행하는 모습들입니다.





