본 프로젝트는 국내 대기업 과제로 수행된 수중 로봇 및 4족 보행 로봇 개발 사례로, 한국수력원자력 중앙연구원의 실증 환경을 고려한 현장 테스트와 실용 목적의 로봇 기술이 반영되었습니다.
2013년 4월부터 2014년 7월까지 개발이 진행되었으며, 원자력 발전소 외곽에 설치된 필터를 촬영하고 청소하는 임무를 수행하기 위해 수중 로봇과 4족 보행 로봇이 함께 개발되었습니다.
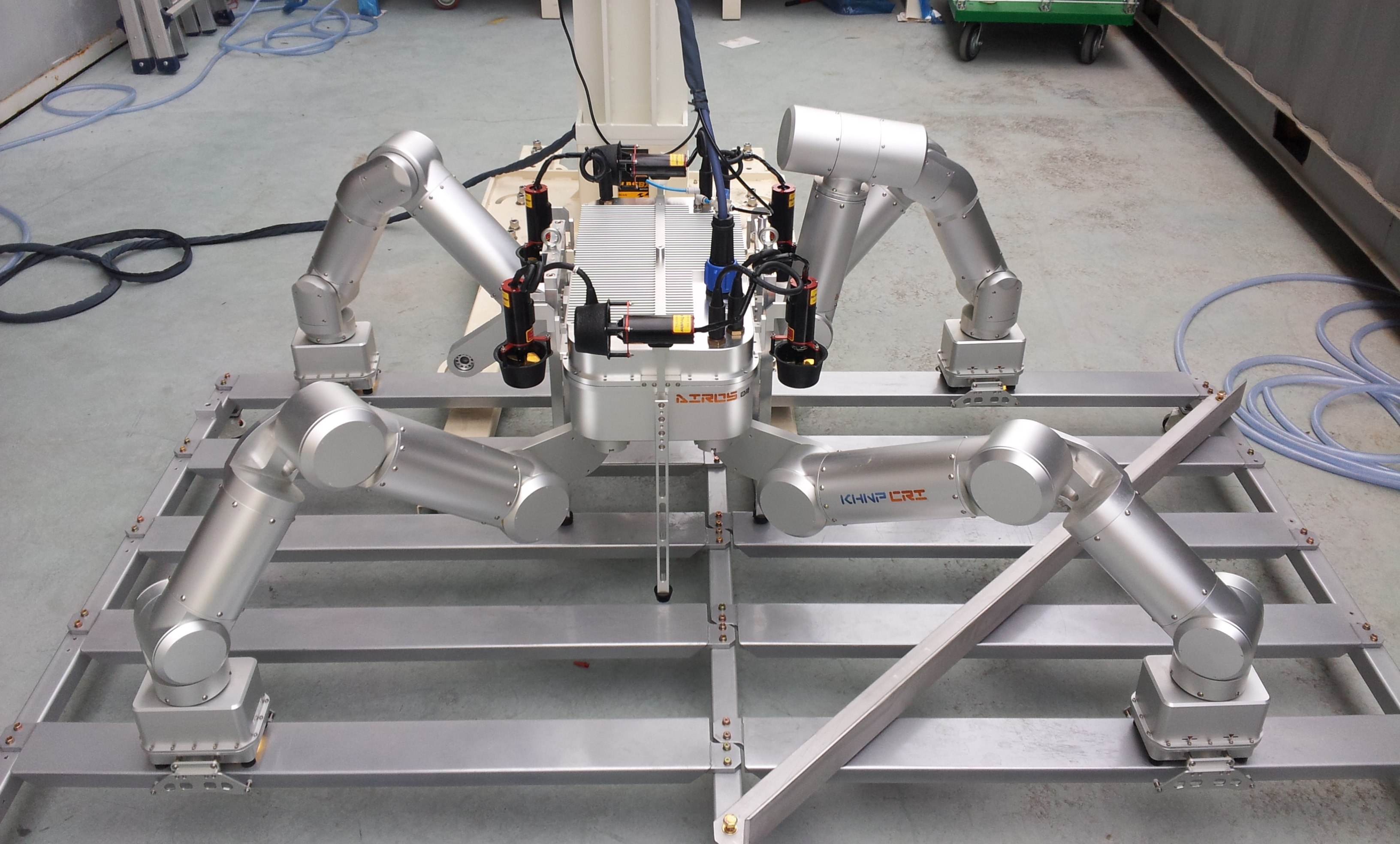
수중 로봇은 수중 추진기 제어를 기반으로 한 자율 주행 기능을 갖추고 있으며, 4족 보행 로봇은 실시간 제어와 역기구학 기반의 보행 제어 기술을 적용하여 현장 환경에서 안정적인 동작이 가능하도록 설계되었습니다.
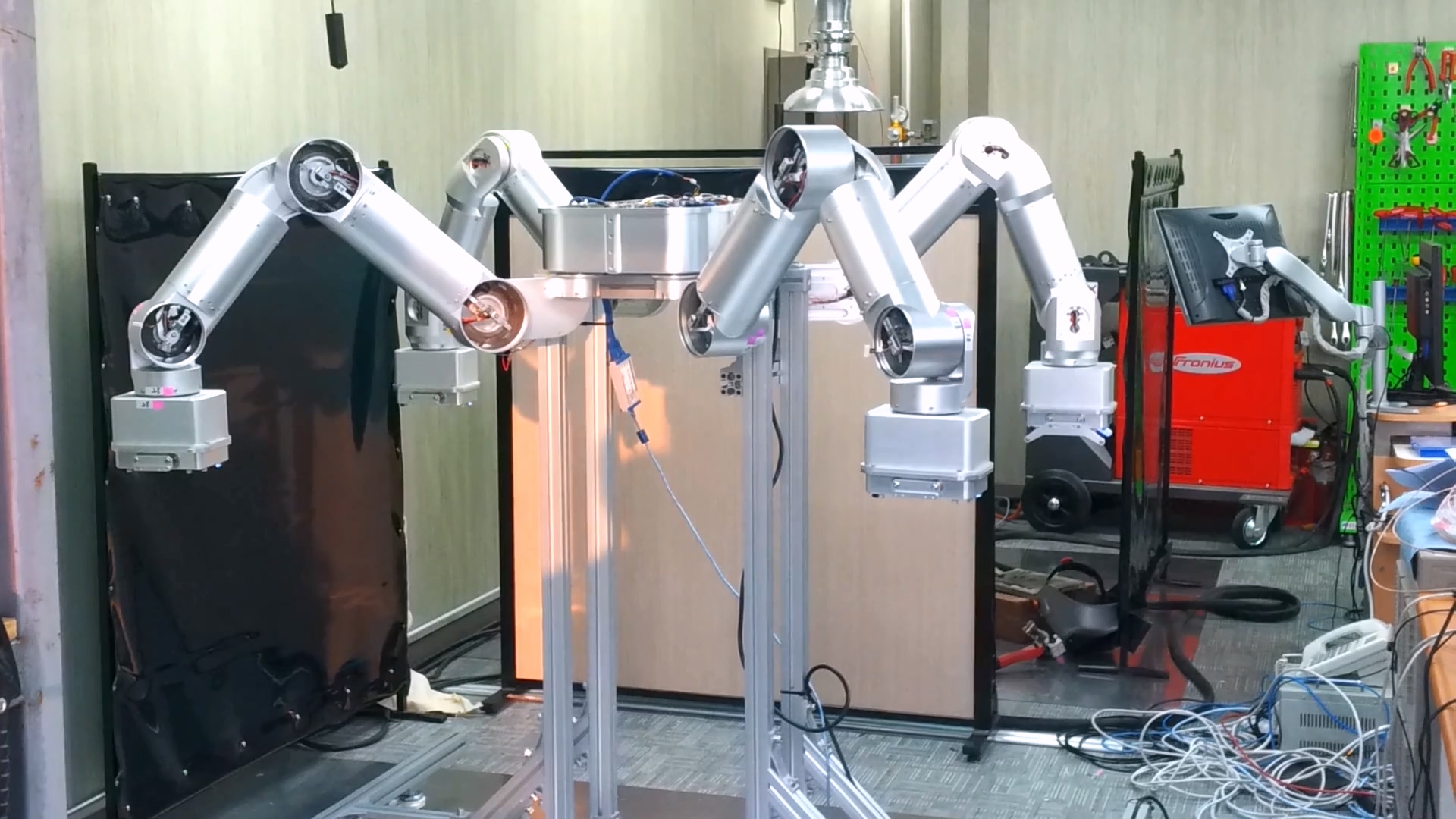
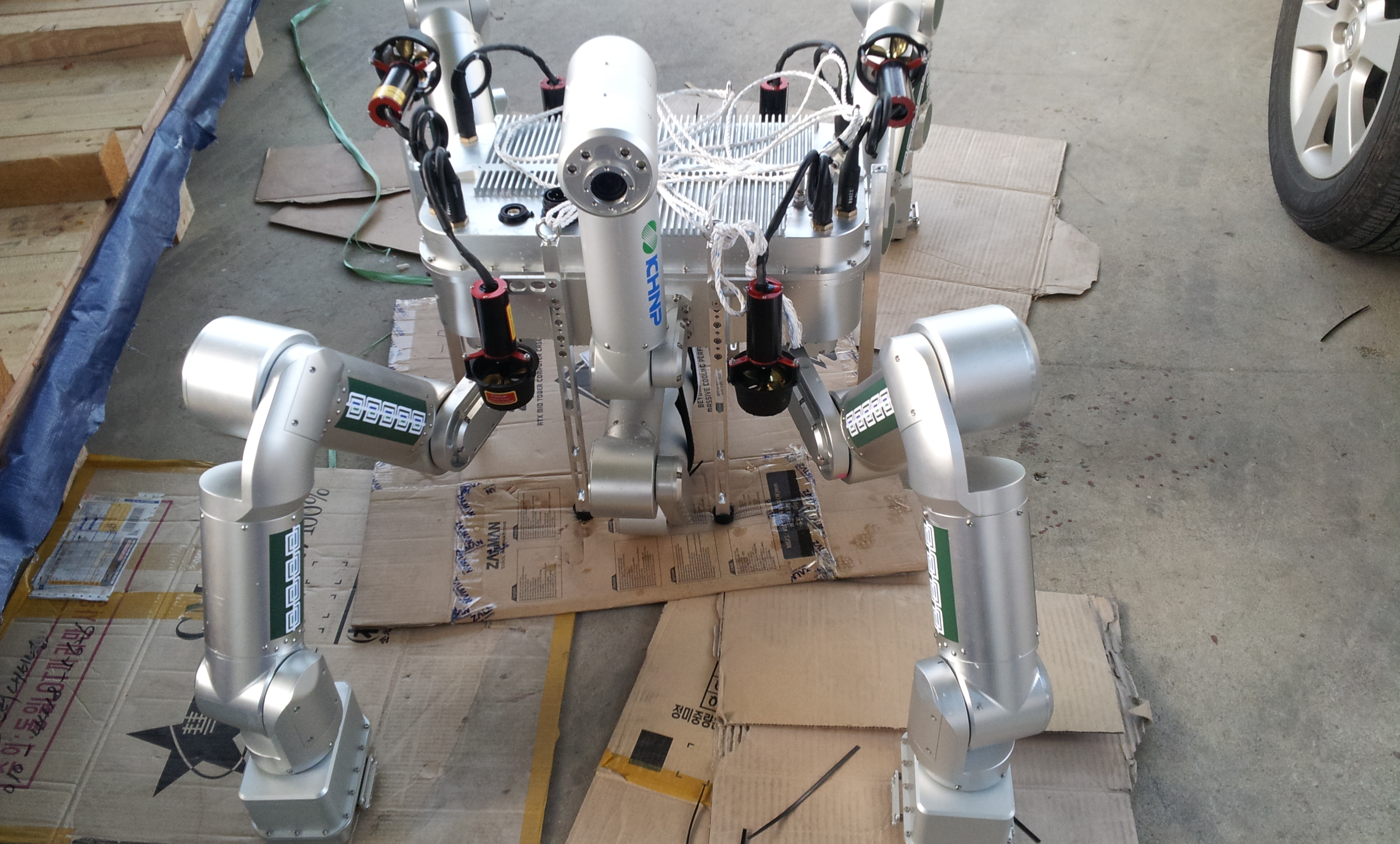
개발 초기 단계에서 사무실 환경에서 모션 생성과 액추에이터 기본 구동을 수행하였으며, 카메라 동작 상태 점검 및 출력 프로그램 개발, 추진기 구동 테스트를 진행했습니다.


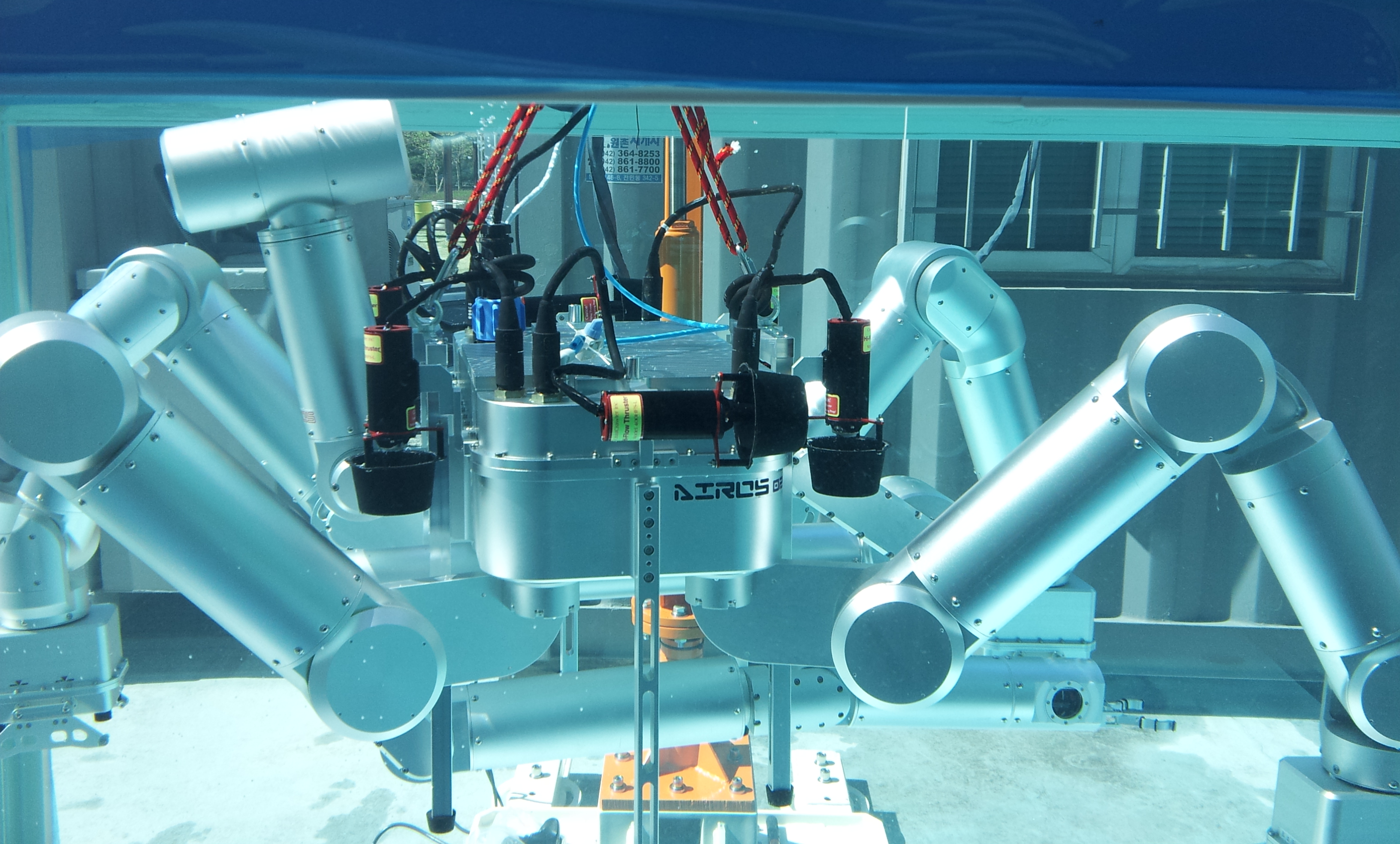
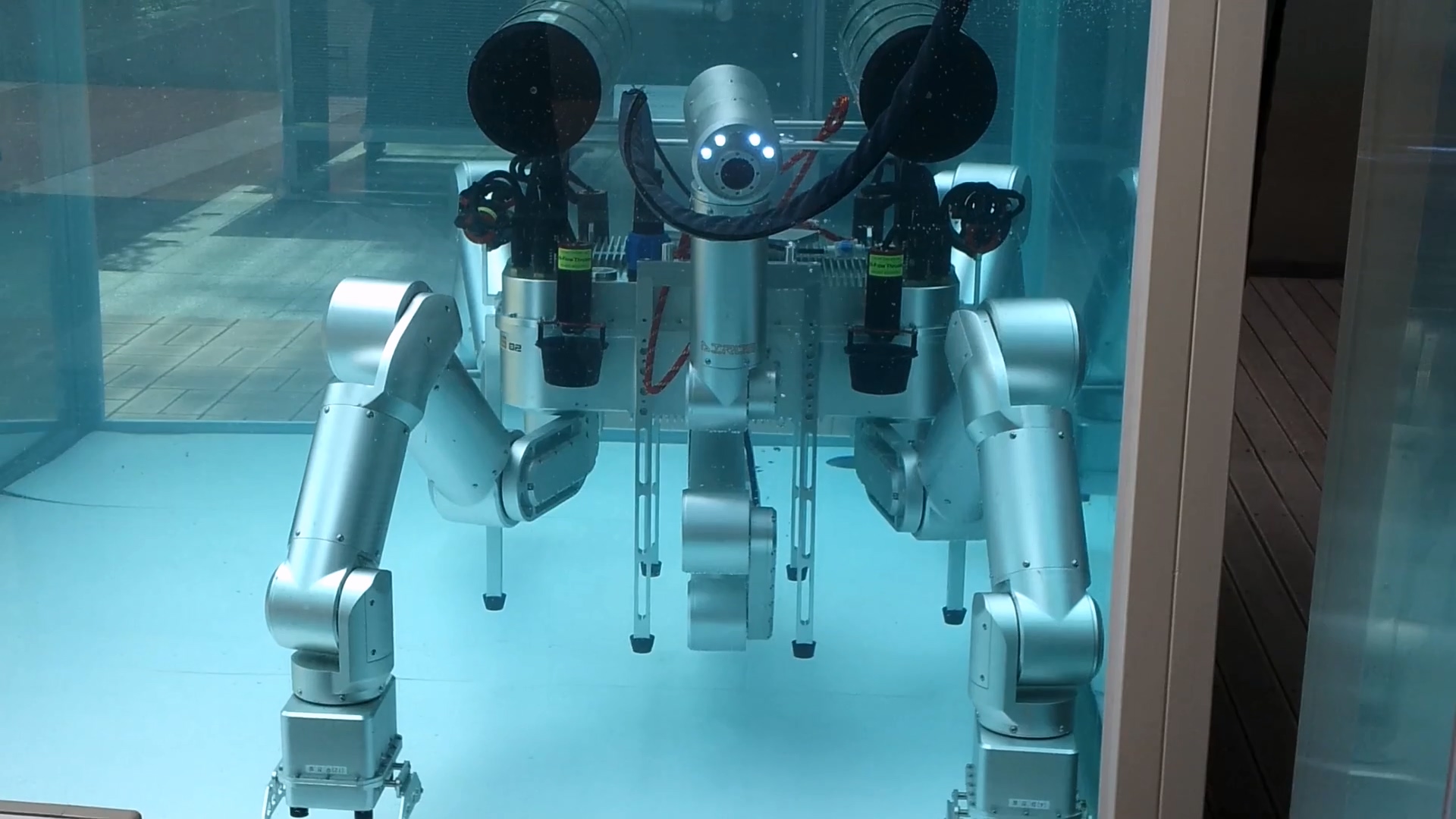
수조에 물을 채운 후 수중 유영 모션을 테스트했습니다. 추력기를 이용하여 전·후·좌·우 이동과 잠수 및 부상 동작을 검증했습니다. 또한 수중 환경에서 네 개의 다리를 이용한 이동과 팔의 구동을 테스트하고, 방수 상태가 안정적으로 유지되는지 확인했습니다.






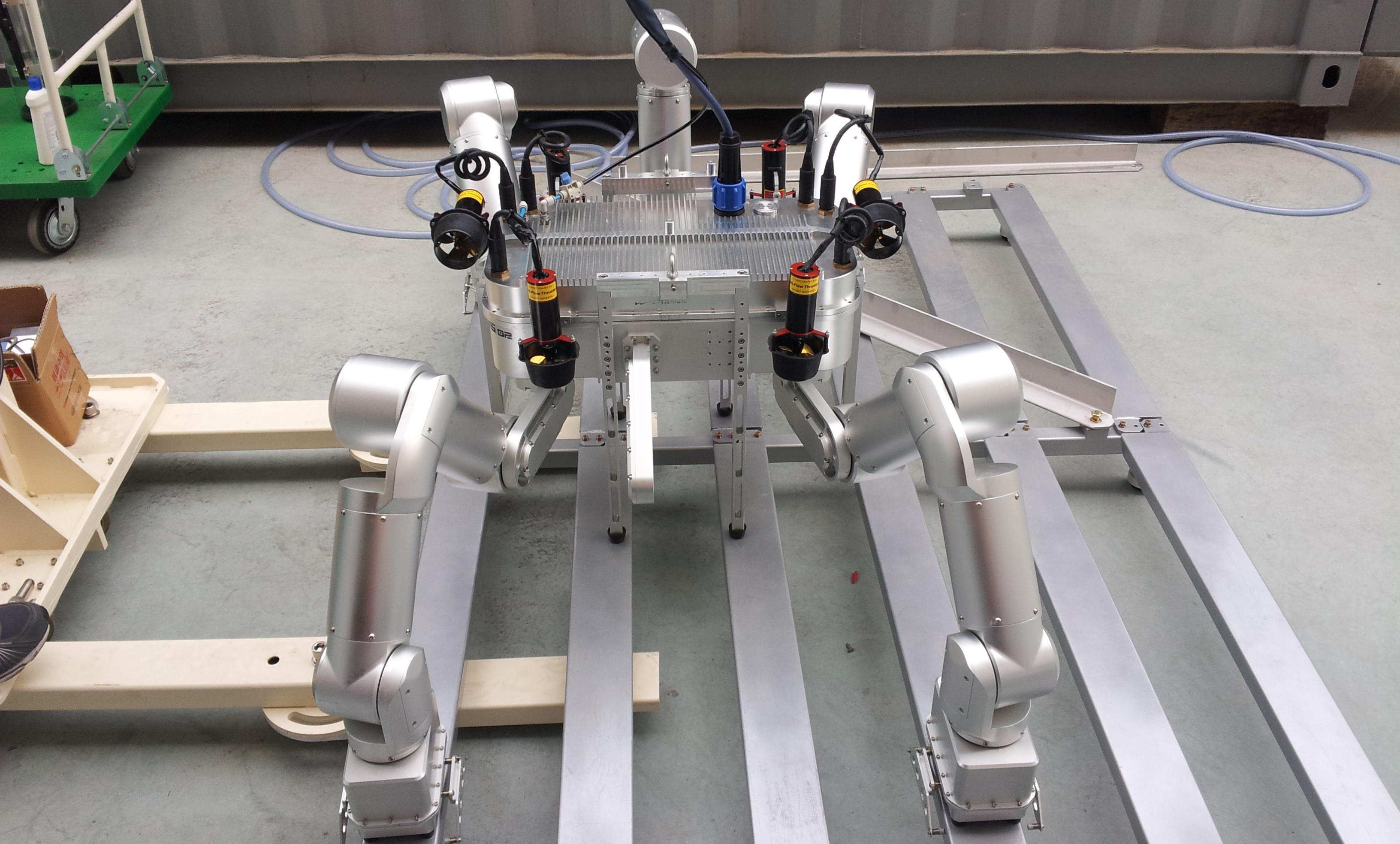
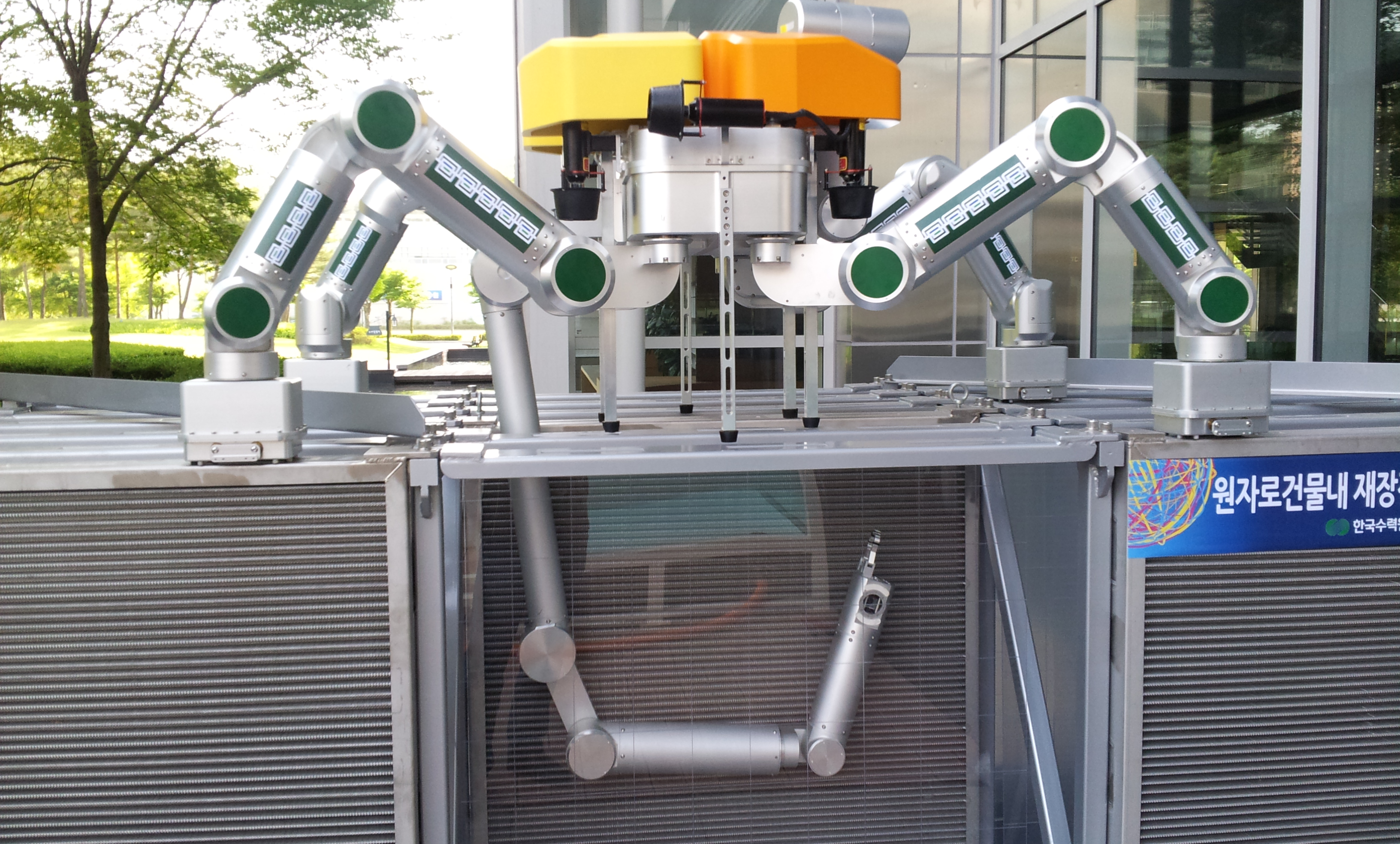
원자력 발전소에 설치된 필터 위를 이동하는 모션을 지상 환경에서 테스트하고 있습니다. 붕소로 채워진 공간에서 수중 이동을 통해 필터에 안착한 뒤, 카메라가 장착된 팔을 이용하여 필터의 상태를 점검합니다.
점검이 완료되면 다음 필터로 이동하여 동일한 작업을 반복 수행합니다.
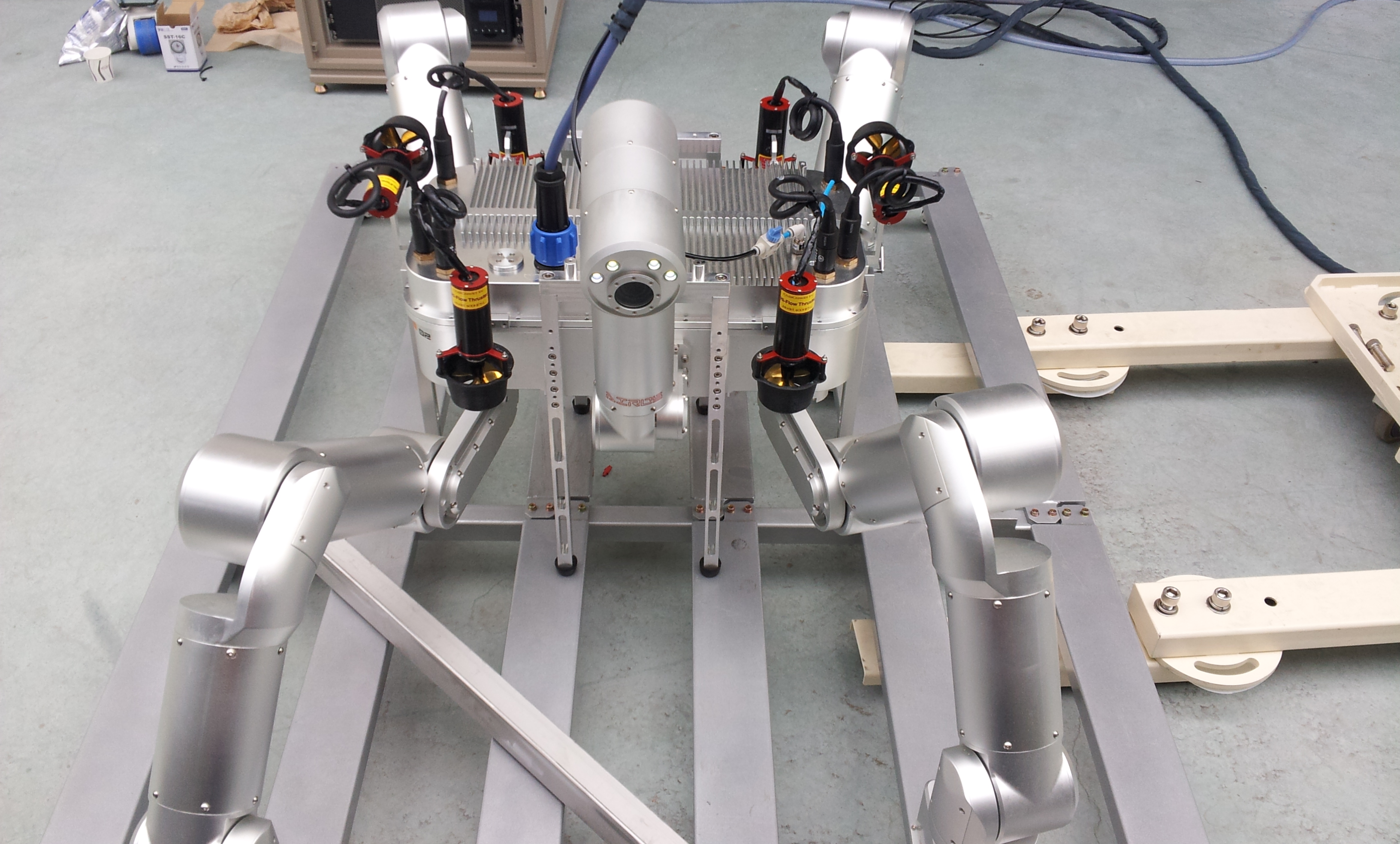

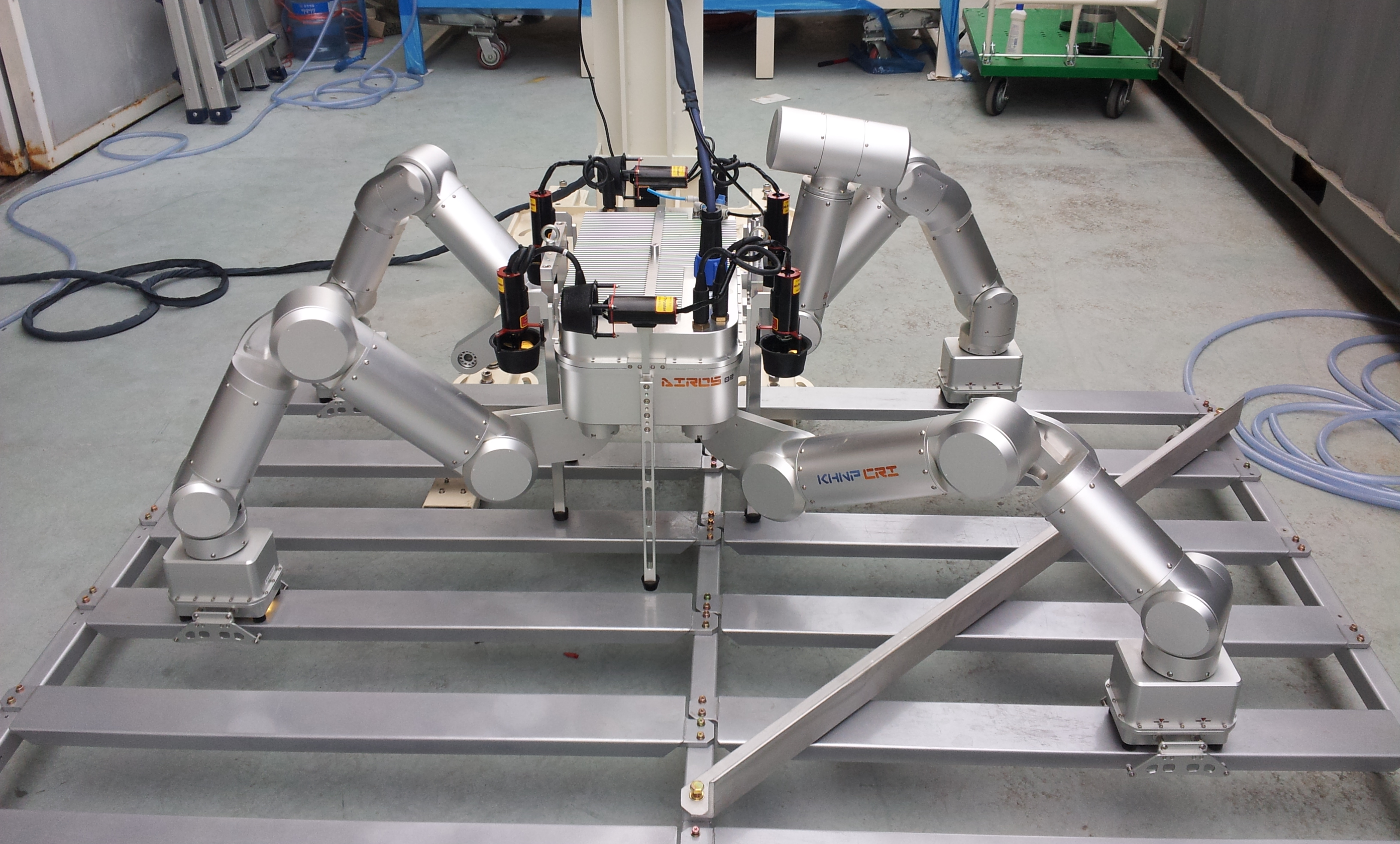

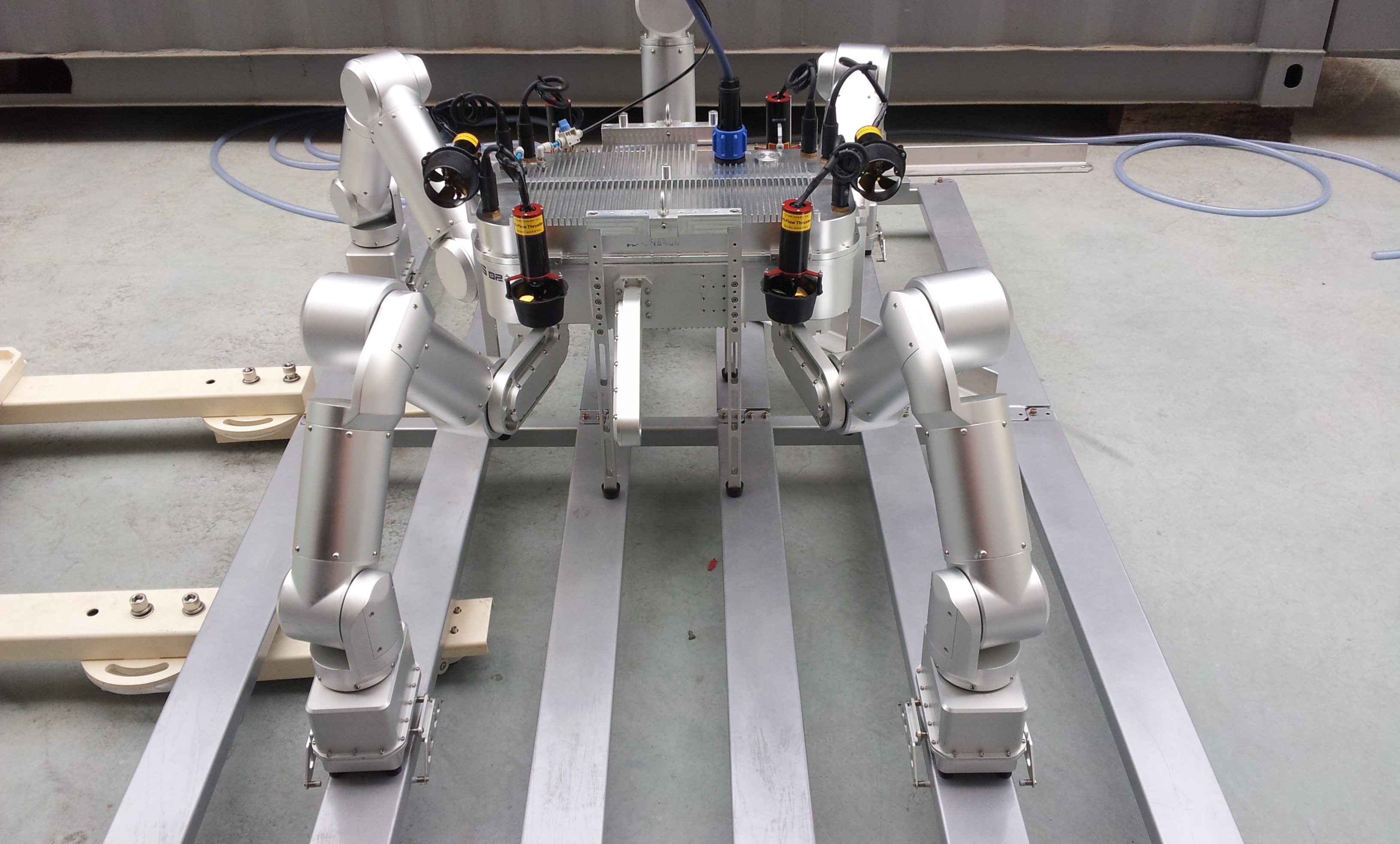

본 영상은 1차 개발 로봇을 납품하기 전에 데모를 준비하는 과정입니다. 실내 환경에서 로봇의 다리와 카메라가 장착된 팔의 모션을 수행합니다.






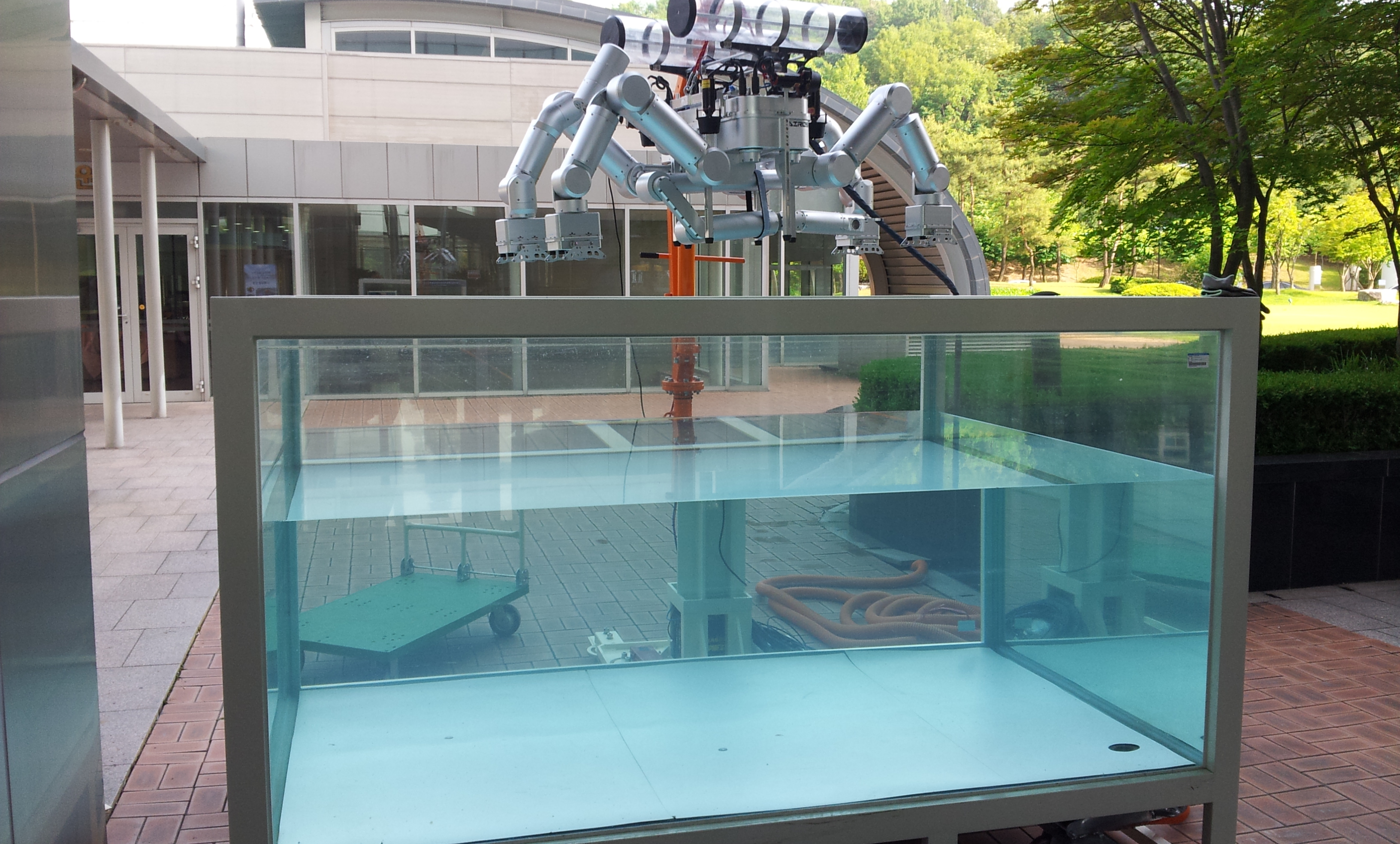
개발한 로봇의 성과를 전시하기 위해 수조 환경에서 로봇의 이동과 동작을 시연했습니다. 로봇에 내압을 적용하여 완전한 방수 성능을 확보했으며, 추력기를 이용해 수중에서 자유롭게 이동할 수 있도록 구현했습니다.





공장 수조에 옮겨 기본 동작을 테스트했습니다.






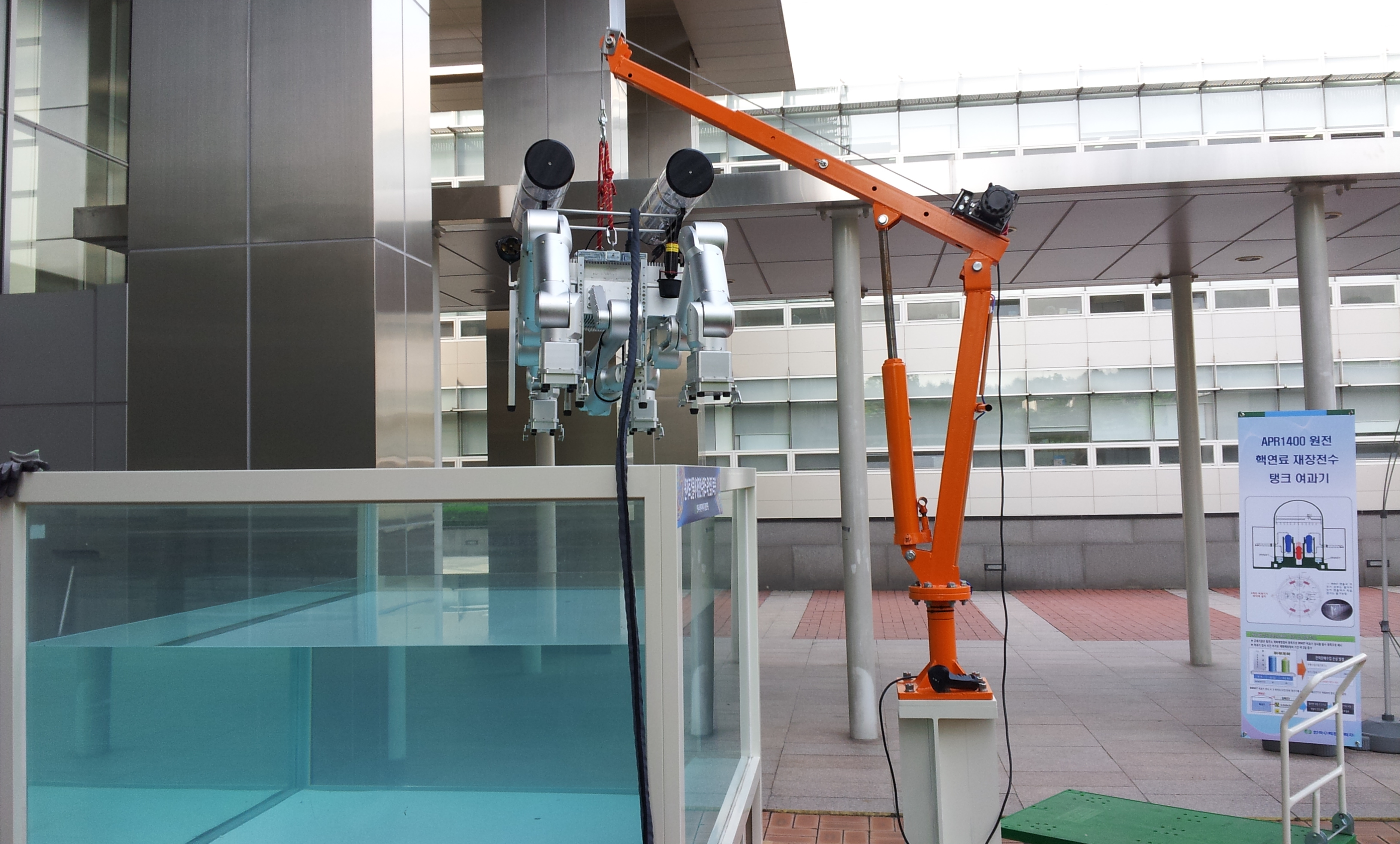
한수원중앙연구원 데모를 위해 수조에 로봇을 설치하고 있습니다.



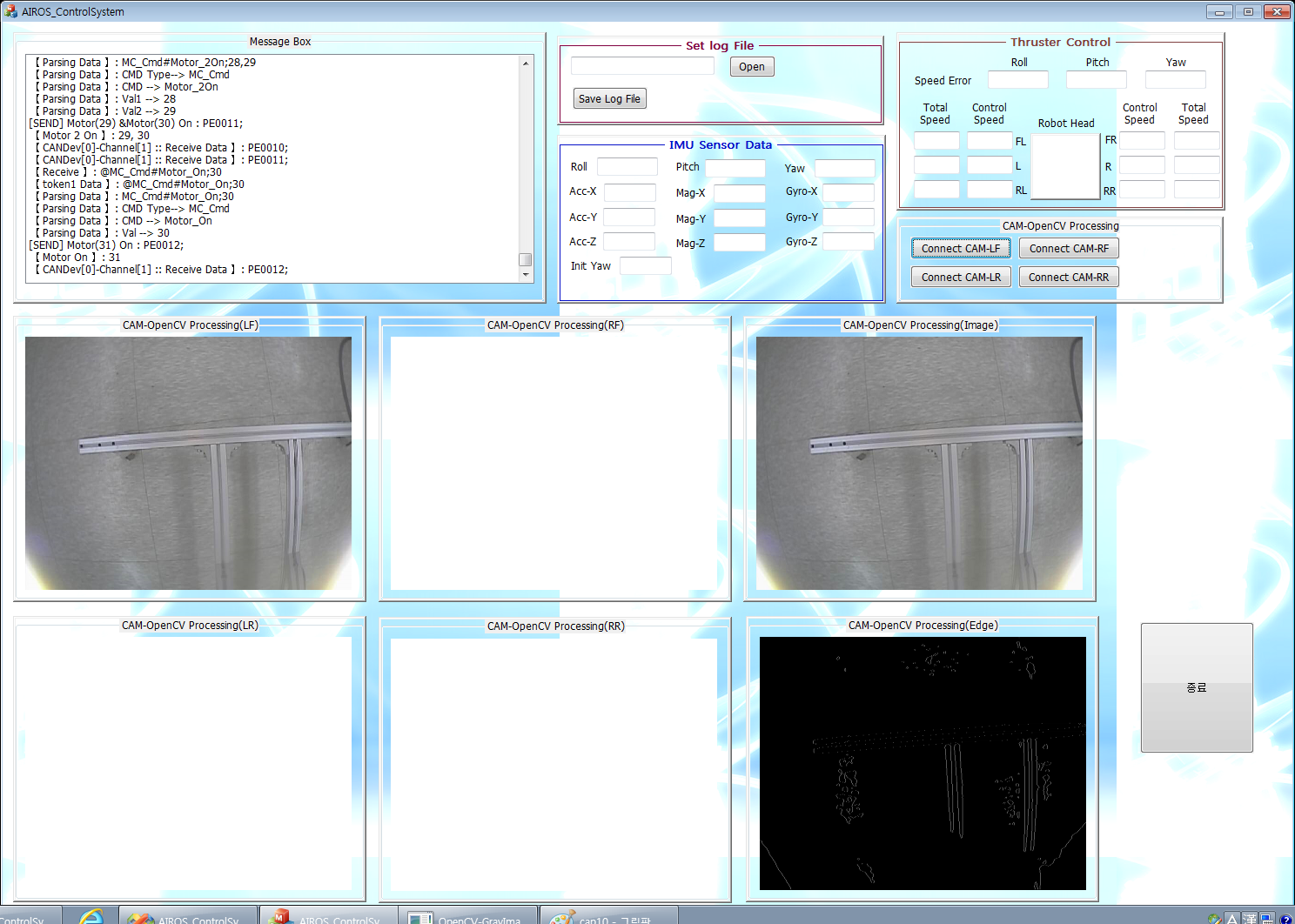
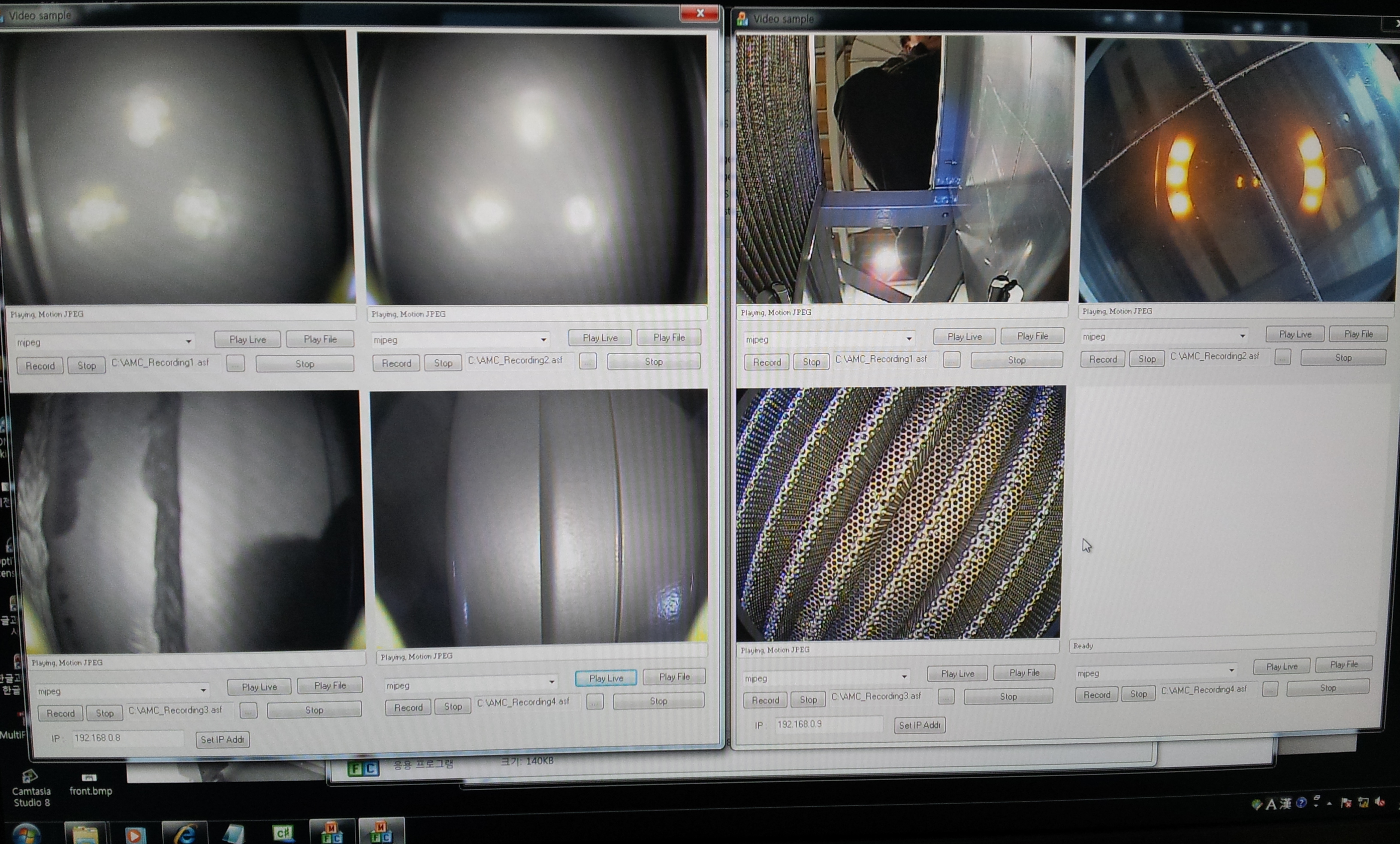
로봇에 설치된 각종 카메라 영상입니다.



프로그램 캡처 화면들입니다.