조작성능평가 시스템은 봇산업클러스터 구축 장비를 활용한 시험·인증 지원을 위해, 로봇 조작 입력에 대한 응답 변화를 계측하고 성능을 분석하는 장비입니다.
본 시스템은 총 8가지 시험 항목에 대한 측정 결과를 실시간으로 확인 및 기록할 수 있는 모니터링 시스템을 제공합니다.
Cooperating with Man or Robot 평가 시스템 구현을 위해 6축 이상의 매니퓰레이터와, 8가지 시험 항목을 동시에 시험할 수 있는 4DoF 이상의 손가락 모듈 10개 이상을 적용하였습니다. 또한 로봇의 3차원 움직임을 정밀하게 파악하여 작업 반복 정확도를 측정할 수 있도록 3D 모션 캡처 시스템을 사용하였습니다.
로봇 손가락 힘 측정 장비는 접촉 면의 수평 방향 위치·속도 프로파일과 수직 방향 힘 프로파일을 추종하도록 구성되었습니다.
손가락의 비접촉 상태 위치·속도는 목표 위치·속도 프로파일을 추종하며, 3D 모션 캡처를 통해 계측합니다.
파지력 측정은 물체를 파지한 후 압력을 측정하는 방식으로 수행되며, 원기둥 또는 구 형태의 물체 내부 압력을 측정합니다.
손의 미끄러짐 세기 측정은 로드셀이 장착된 원통(1축 병진 자유도)과 이를 1축으로 병진 운동시킬 수 있는 저울 형태의 기계 장치로 구성하였으며, 그립력 측정을 위한 모니터링 장비를 구현하였습니다.
손가락의 물체 조작성 평가는 공 형태의 물체를 원하는 회전 방향으로 조작하고, 3D 모션 캡처를 사용하여 분석합니다.
물체 조작 성능 평가는 3D 모션 캡처 기반으로 수행되며, 삽입 성공 여부를 자동으로 판정하는 장치를 개발하고 카메라를 이용한 비전 측정을 적용하였습니다.
문 열기 성능 평가는 표준화된 여닫이문 및 미닫이문 환경을 구성하고, 3D 모션 캡처를 활용하여 성공 여부를 판단합니다.
물건 같이 들기 평가는 Master(측정 로봇)와 물체를 함께 든 상태에서 Master가 임의의 방향으로 물체를 잡아당겼을 때, 물체와의 접촉을 유지한 채 얼마나 잘 추종하는지를 측정합니다.
총 8가지 실험 항목을 측정할 수 있도록 GUI 프로그램을 개발하였으며, 각 항목은 Tab 형태로 구분하여 전체 또는 개별 출력이 가능하도록 구성하였습니다.
한국로봇산업진흥원 평가실에서 테스트 및 시연을 수행하였으며, 납품 이후에도 프로그램 개선 작업을 지속적으로 진행하였습니다.


















1. 사무실 문 테스트
사무실 환경에서 UR 로봇을 활용하여 회전도어 조작 테스트를 수행하고 있습니다. 로봇 매니퓰레이터 종단에 장착된 로봇 팔의 위치를 3D 카메라로 실시간 인식하여, 이를 기반으로 로봇의 이동 및 조작을 수행합니다.

동영상 링크 : 조장성능평가 시스템-사무실 문 테스트
2. 사무실 로봇 손 테스트
사무실 환경에서 국내 로봇 기업이 개발한 로봇 팔의 동작을 테스트하고 있습니다. 특히 로봇이 원기둥 형태의 물체를 파지할 때 발생하는 파지력을 측정하고 이를 확인하였습니다.

동영상 링크 : 조장성능평가 시스템-사무실 로봇 손 테스트
3. GUI 프로그램 개발
조작성능 평가를 위한 GUI 프로그램을 개발하였습니다. 본 프로그램은 기능별 조작 버튼, 메시지 출력 창, 그래프 시각화, OpenGL 기반 3D 시각화 화면, 파일 저장 및 불러오기 등 다양한 기능을 포함하고 있습니다. 총 8가지 평가 항목을 측정할 수 있도록 각 항목을 서로 다른 탭으로 구분하여 배치하였습니다.

동여상 링크 : 조장성능평가 시스템-GUI 프로그램 개발
4. 문 열기 성능 평가 #1
한국로봇산업진흥원 평가 장소에서 여닫이문 개방 성능 테스트를 수행하였습니다. 주변에 총 3대의 3D 카메라를 설치하고 로봇 손에 태그를 부착하여 위치를 실시간으로 인식하였으며, 이를 기반으로 프로그램에서 로봇의 주행 경로를 생성하여 제어 명령으로 전달합니다. 또한 로봇의 실시간 동작 상태를 OpenGL 화면으로 시각화하고, 위치 데이터를 동시에 기록합니다.

동영상 링크 : 조장성능평가 시스템-문 열기 성능 평가 #1
5. 문 열기 성능 평가 #2
한국로봇산업진흥원 평가 장소에서 미닫이문 개방 성능 테스트를 수행하였습니다. 시험 환경 주변에 총 3대의 3D 카메라를 설치하고 로봇 손에 태그를 부착하여 위치를 실시간으로 인식하였으며, 이를 기반으로 프로그램에서 로봇의 이동 경로를 생성하여 제어 명령으로 전달합니다. 또한 로봇의 실시간 동작 상태를 OpenGL 화면으로 시각화하고, 위치 데이터를 동시에 기록합니다.

동영상 링크 : 조장성능평가 시스템-문 열기 성능 평가 #2
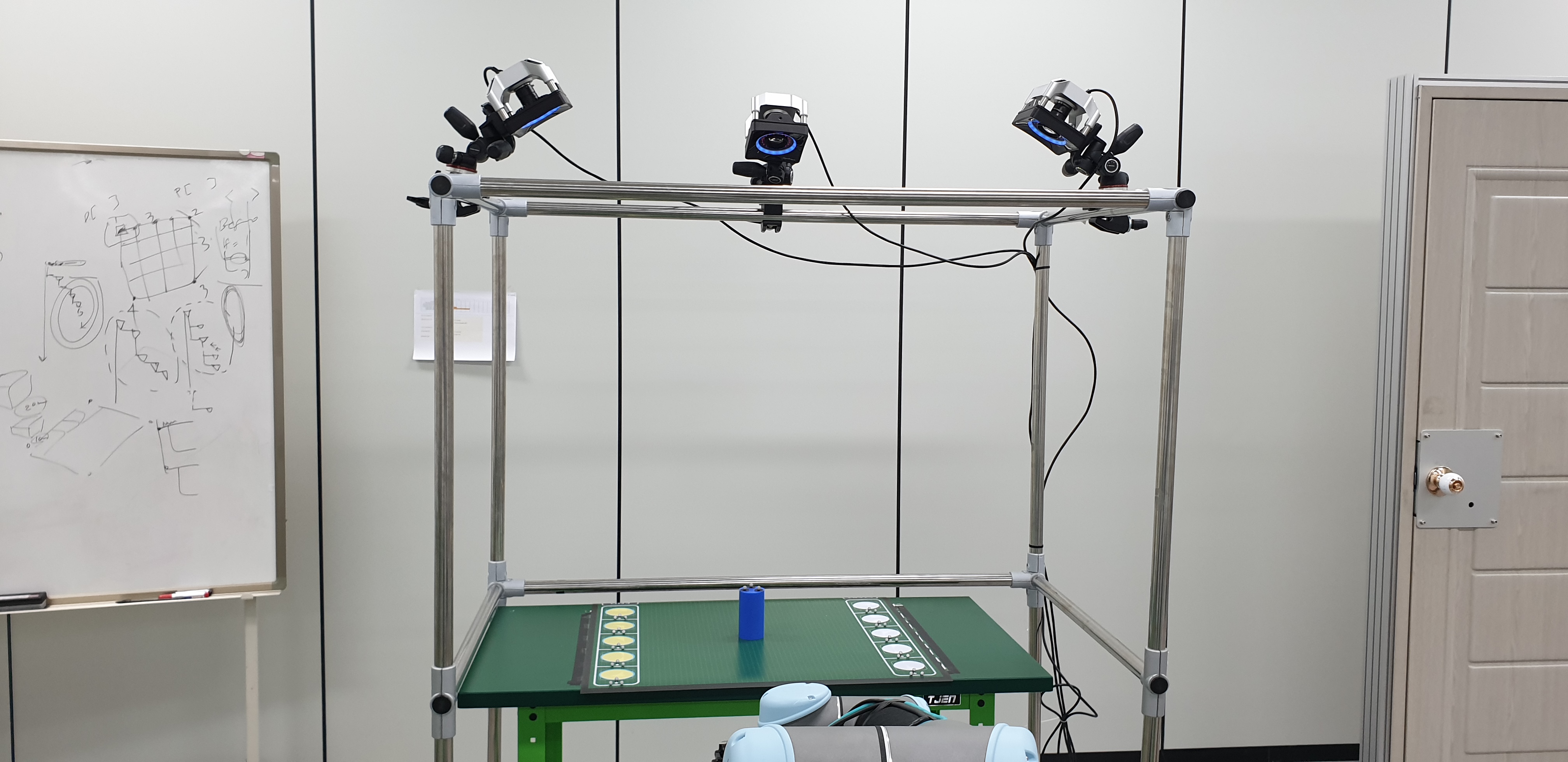
6. 물체 이동
원기둥을 인식한 후 로봇 손으로 이를 파지하여 지정된 위치로 이동시키고, 도달 정확도를 측정함으로써 작업 수행 정도를 평가한다. 목표 위치는 총 3곳으로 설정하며, 각 위치에 대해 반복 실험을 수행하여 위치 정확도를 측정하고 이를 기반으로 작업 적합성을 판단한다. 원기둥의 위치는 태그를 부착한 뒤 3D 카메라를 이용하여 인식하며, GUI 프로그램에서 목표 위치를 설정하면 로봇은 해당 위치에 원기둥을 정확히 배치한다.

동영상 링크 : 조장성능평가 시스템-물체 이동
7. 협동 이동
2대의 로봇을 이용하여 물건 같이 들기(cooperative lifting) 성능 평가 테스트를 수행하였습니다. 한 대의 로봇 손에 마커를 부착하고, 가벼운 봉 형태의 물체를 두 로봇이 함께 파지하도록 구성하였습니다. 이후 한 로봇의 종단을 특정 궤적으로 이동시키면, 3D 카메라를 통해 해당 로봇 팔의 이동 좌표를 실시간으로 인식하고, 다른 로봇이 동일한 궤적을 추종하도록 제어합니다. 이 과정에서 이동 좌표 데이터는 파일로 기록하여 분석에 활용합니다.

동영상 링크 : 조장성능평가 시스템-협동 이동
