1. ROS2 개발 환경 설정
다음 소프트웨어는 ROS 2를 이용한 로봇 프로그래밍에 필수적인 소프트웨어 모음입니다. 개발 환경 설치 시에 반드시 설치할 것을 권장합니다.
sudo apt update && sudo apt install -y \
build-essential \
cmake \
git \
libbullet-dev \
python3-colcon-common-extensions \
python3-flake8 \
python3-pip \
python3-pytest-cov \
python3-rosdep \
python3-setuptools \
python3-vcstool \
wget


python3 -m pip install -U \
argcomplete \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-docstrings \
flake8-import-order \
flake8-quotes \
pytest-repeat \
pytest-rerunfailures \
pytest


sudo apt install --no-install-recommends -y \
libasio-dev \
libtinyxml2-dev \
libcunit1-dev
2. ROS2 빌트 테스트
ROS 2 설치가 완료되었다면, 가장 먼저 확인해야 할 것은 정상적으로 빌드 환경이 구성되었는지입니다.
이를 위해 ROS 2에서는 colcon 기반의 워크스페이스를 생성하고 테스트 빌드를 수행합니다.
이 과정은 실제 패키지를 빌드하기 위한 목적이 아니라, ROS 2 개발 환경이 정상 동작하는지 검증하는 필수 단계입니다.
아래의 명령을 실행하여 먼저 ROS 2 환경을 쉘에 적용합니다.
/opt/ros/humble/ → ROS 2 Humble이 설치된 기본 경로입니다. setup.bash 파일은 ROS 2 실행에 필요한 환경 변수가 등록되어 있습니다.
source /opt/ros/humble/setup.bash
우분투에서 source 명령어는 파일 안에 적힌 쉘 명령어를 현재 터미널 환경에 바로 적용하는 명령어입니다.
보통 ROS 2에서 많이 봅니다.
source /opt/ros/humble/setup.bash뜻은 이겁니다.
/opt/ros/humble/setup.bash 파일을 읽어서
현재 터미널에 ROS 2 환경변수를 적용한다
터미널을 실행할 때마다 위의 명령어를 실행하는 것은 번거롭기 때문에 .bashrc에 등록하는 것이 좋습니다.
파일 이름 앞에 '.'이 있으면 이 파일은 숨김 파일이라는 뜻입니다. .bashrc 파일은 home 폴더에 있습니다. ls 명령어로는 파일이 보이지 않습니다. ls -al로 파일의 존재 여부를 확인할 수 있습니다.
아래의 명령어를 실행하여 .bashrc에 등록합니다. 등록한 후에는 sourde 명려어로 .bashrc 파일을 실행합니다.
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc

아래의 그림은 .bashrc 파일에 source 실행 명령이 추가되어 있습니다.

ROS 2는 워크스페이스 기반 개발 구조를 사용합니다.
워크스페이스는 여러 패키지를 관리하는 최상위 디렉터리입니다.
아래의 명령을 실행하여 robot_ws 폴더를 생성하고 폴더 안에 src 폴더를 생성합니다. -p 옵션을 사용할 경우 폴더가 존재하지 않으면 새롭게 생성합니다.
mkdir -p ~/ros2_study/src
cd ~/ros2_study

폴더 구조를 확인하고 싶을 때에는 tree 명령을 사용합니다. 만약 tree 명령이 실행되지 않으면 설치가 되지 않은 상태입니다. 아래의 명령을 실행하여 tree를 설치해야 합니다.
sudo apt install tree
tree 명령을 실행하여 트리 구조를 확인합니다. robot_ws는 워크스페이스 루트이며, src는 ROS 2 패키지가 위치하는 디렉터리 (필수)입니다.
ROS 2는 colcon이라는 빌드 시스템을 사용합니다. 아래의 명령을 실행하여 새롭게 생성한 ros2 작업 폴더의 빌드를 수행합니다.
colcon build --symlink-install
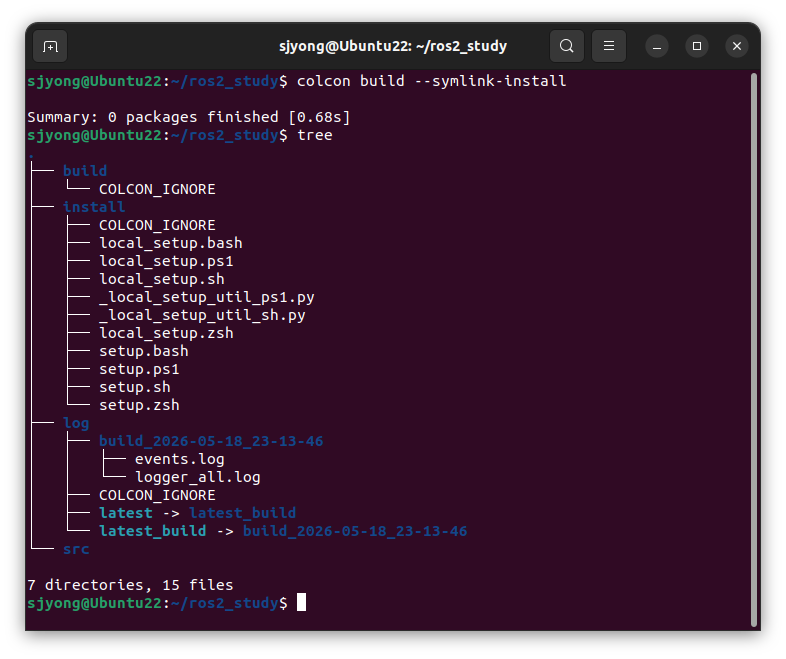
--symlink-install 옵션은 개발 효율성을 높이기 위한 핵심 옵션입니다. 이 옵션을 사용하면 코드 수정 후 재빌드 최소화, Python 패키지는 즉시 반영됩니다.
빌드가 정상적으로 완료되면 위와 같이 build, install, log 3개의 폴더가 새롭게 생성됩니다.
build 폴더는 컴파일 중간 파일 저장용이며 CMake 결과가 포함됩니다.
install 폴더는 실제 실행 가능한 파일이 존재하며 환경 변수 설정 시 사용됩니다.
log 폴더는 빌드 로그가 저장되며 에러 분석 시 필수 폴더입니다.
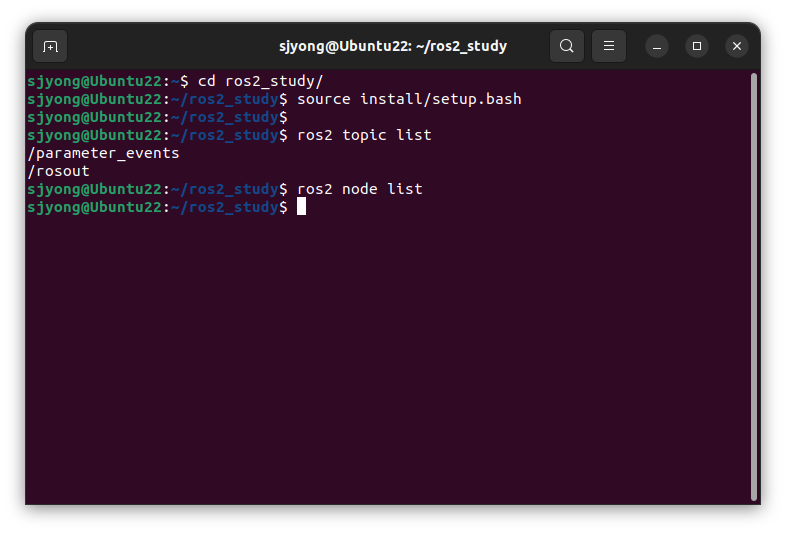
빌드가 완료된 후에는 반드시 아래 명령을 실행해야 합니다. 워크스페이스 내부 패키지를 ROS 2에서 인식하도록 설정하기 위해서 아래의 명령이 반드시 실행되어야 합니다.
source install/setup.bash
아래의 명령들을 실행하여 ROS2의 정상적으로 동작하는지 확인할 수 있습니다.
ros2 topic list
ros2 node list
3. 실무에서 자주 발생하는 문제
a. colcon 명령이 실행되지 않음
아래의 명령어를 실행하여 python3-colcon을 설치합니다.
sudo apt install python3-colcon-common-extensions
b. ros2 명령어가 실행되지 않을 경우
hunble의 setup.bash 파일을 source로 실행합니다.
source /opt/ros/humble/setup.bash
c. 빌드 후 패키지 인식이 안될 경우
install 폴더의 setup.bash 파일을 source로 실행해야 합니다.
source install/setup.bash
'강좌 > ROS2' 카테고리의 다른 글
| ROS2 Topic (0) | 2026.05.04 |
|---|---|
| ROS2 Service (0) | 2026.05.04 |
| ROS2 Humble에서 Turtlesim 설치 및 실행하기 (0) | 2026.05.03 |
| ROS2 Run Commands 설정 (0) | 2026.05.03 |
| Ubuntu 22.04에서 ROS2 설치 (0) | 2026.05.03 |
