1. ROS 홈페이지에 접속하면 다양한 정보를 확인하실 수 있습니다. 12번째로 릴리즈된 ROS Melodic Morenia를 설치합니다. 아래의 웹페이지를 참조하면 다양한 정보를 얻을 수 있습니다.
melodic - ROS Wiki
ROS Melodic Morenia ROS Melodic Morenia is the twelfth ROS distribution release. It was released on May 23rd, 2018. Platforms ROS Melodic Morenia is primarily targeted at the Ubuntu 18.04 (Bionic) release, though other Linux systems as well as Mac OS X, An
wiki.ros.org
2. "Installation"에 있는 링크를 클릭하시면 설치 안내 사이트로 이동합니다.
3. 설치 OS는 Ubuntu 18.04 LTS이 버전입니다.
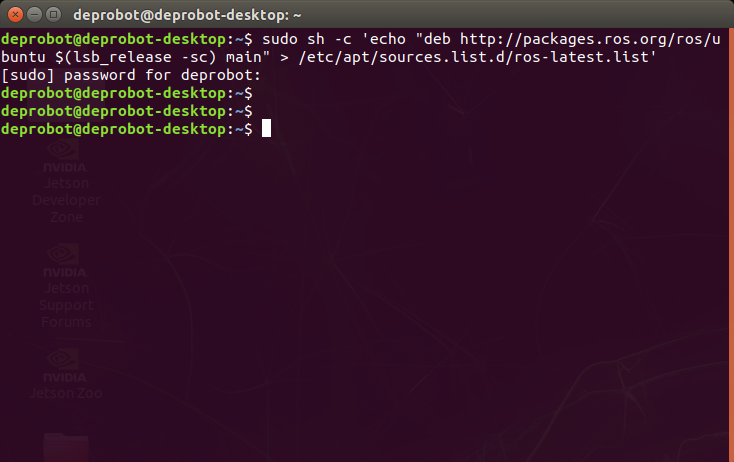
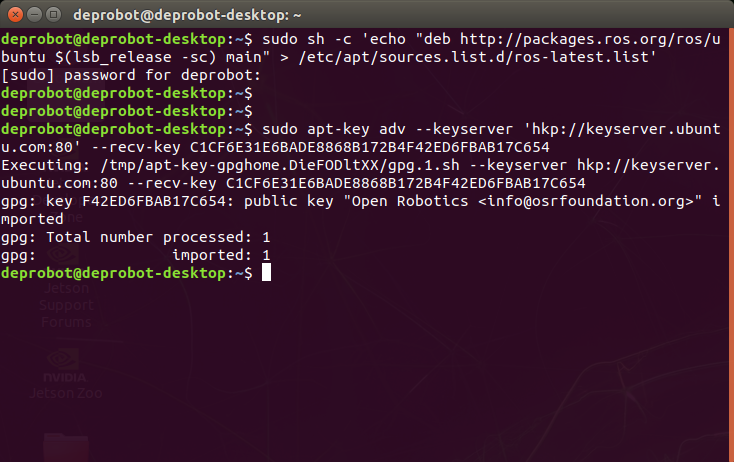
4. packages.ros.org의 소프트웨어를 내려받을 수 있도록 설정합니다.
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
5. ROS Repository에서 패키지를 내려받기 위해 공개키를 추가해야 합니다. 아래와 같이 입력합니다. 웹문서에서 안내한 키서버가 동작되지 않을 경우, 추가로 제시하는 키 서버를 이용할 수 있습니다. 여기서는 MIT 서버를 이용합니다.
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
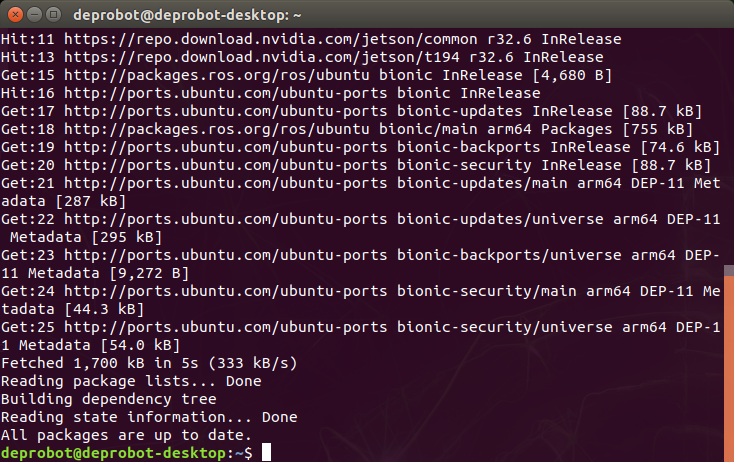
6. 다음 단계에서는 Ubuntu의 Debian 패키지 리스트를 다시 인덱싱 합니다. 필수 사항은 아니지만 ROS를 설치하기 전에 Ubuntu의 모든 패키지를 업그레이드 합니다.
sudo apt update

7. 지금까지 ROS 설치를 위한 준비를 완료하였습니다. 다음은 ROS Melodic Morenia를 설치합니다. 데스크탑용 기본 버전을 설치합니다.
sudo apt install ros-melodic-desktop




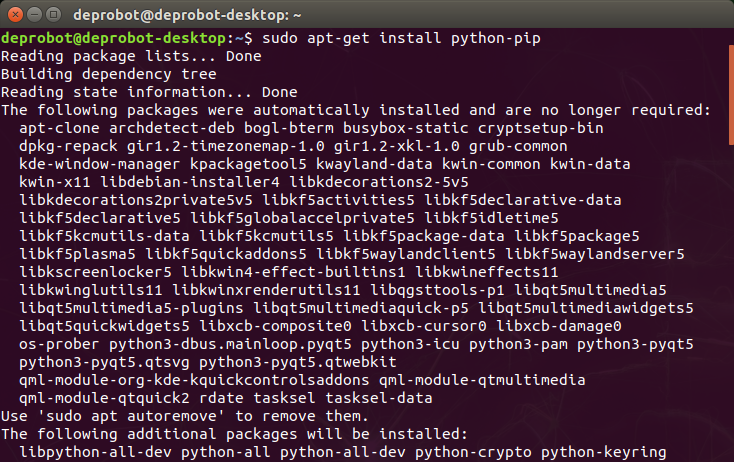
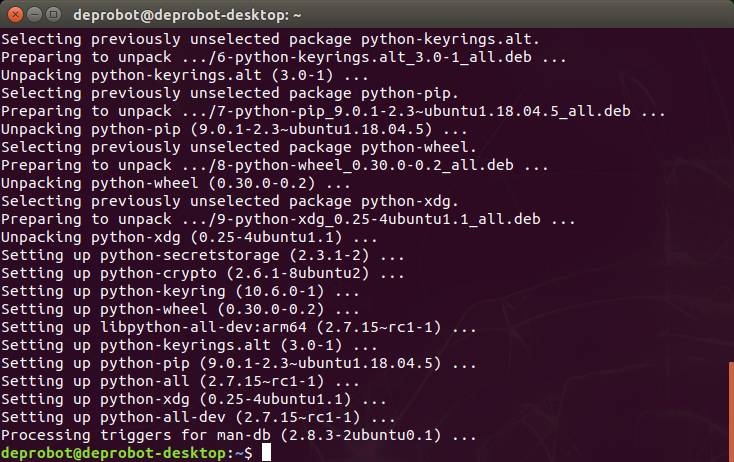
8. rosdep를 실행하기 위한 의존성 패키지를 설치합니다.
source apt-get install python-pip
9. ROS를 사용하기 전에 반드시 rosdep를 초기화해야 합니다. rosdep는 ROS의 소스를 컴파일 하거나 핵심 컴포넌트를 실행하기 위해 필요한 의존성 패키를 쉽게 설치할 수 있도록 도와줍니다. 아래의 명령어를 사용하여 rosdep를 설치합니다.
sudo pip install –U rosdep




10. rosdep의 업데이트를 수행한다.
rosdep update

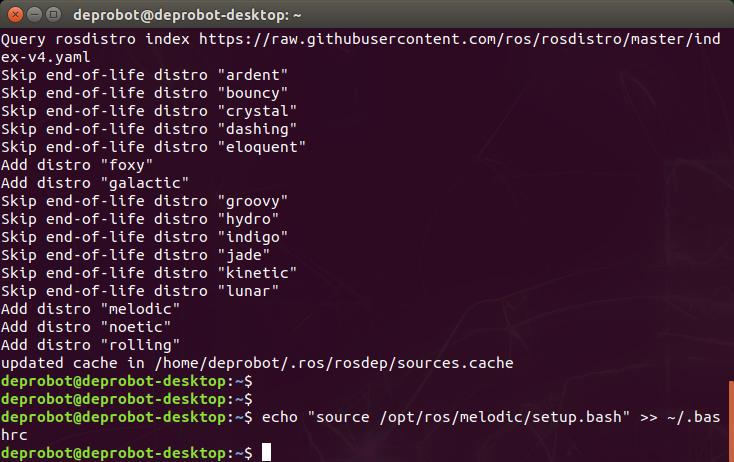
11. 다음은 환경을 설정합니다. 현재 쉘의 환경을 변경하고자 할 경우 아래의 명령어를 사용합니다.
source /opt/ros/melodic/setup.bash
12. 새로운 쉘을 시작할 때마다 ROS 환경 변수가 bash 세션에 자동으로 추가되도록 하기 위해서는 다음 명령어를 사용해야 합니다. 하나 이상의 ROS 배포판이 설치되어 있는 경우의 ~/.bashrc는 현재 사용중인 버전의 setup.bash만 source 합니다.
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
13. ROS 패키지를 빌드하기 위해 이 도구와 다른 의존성 패키지를 설치하려면 다음 명령어를 실행해야 합니다.
sudo apt-get install camke python-catkin-pkg python-empy python-nose python-setuptools libgtest-dev python-rosinstall python-rosinstall- generator python-wstool build-essential git


14. ROS에서 사용하는 빌드 시스템은 catkin입니다. 이 시스템을 사용하기 위해서는 catkin 작업 폴더를 생성하고 초기화해야 합니다.
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/

15. catkin_make를 실행합니다.
catkin_make


16. catkin_make 명령어를 사용하여 빌드를 수행합니다. 빌드가 완료되면 "ls"명령어로 생성된 폴더를 확인할 수 있습니다. src 폴더는 사용자가 생성한 것이고, build 폴더는 빌드 관련 파일이 저장되며, devel 폴더에는 빌드 후 실행 관련 파일이 저장됩니다. 설치 스크립트가 작업 공간을 적절하게 오버레이하도록 하려면 ROS_PACKAGE_PATH 환경 변수에 현재있는 디렉토리가 포함되어 있는지 확인해야 합니다.
ls
source devel/setup.sh
echo $ROS_PACKAGE_PATH

17. catkin 빌드 시스템과 관련된 환경 파일을 불러옵니다.
gedit ~/.bashrc


18. 위의 그림과 같이 최하단에 source 선언문이 추가되어 있습니다.
19. ROS 동작을 테스트하기 위해 먼저 roscore 명령어를 실행합니다.

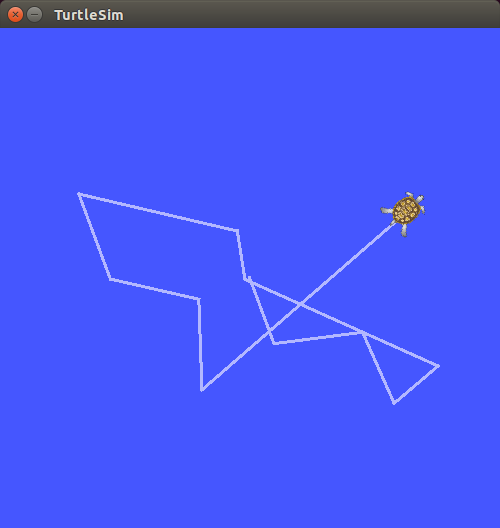
20. 새로운 터미널을 실행하여 turtlesim 패키지의 turtlesim_node를 실행하기 위해 다음 명령어를 실행합니다.
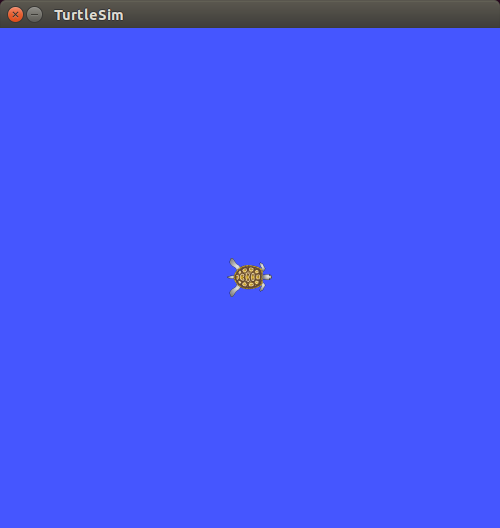
rosrun turtlesim turtlesim_node
21. 위의 명령어를 실행하면 파란색 바탕의 별도 창이 출력되며 거북이 한 마리가 보입니다.
22. 이 거북이를 움직이게 하기 위해서는 새로운 터미널을 실행하고 다음과 같은 명령어를 실행합니다.
rosrun turtlesim turtle_teleop_key
23. 이 터미널 창을 선택한 상태에서 방향키를 이용하여 거북이를 움직일 수 있습니다.
24. rqt_graph 패키지의 rqt_graph 실행을 위해서 아래의 명령어를 실행합니다. rqt_graph 노드는 현재 실행중인 노드들의 정보를 GUI 형태로 출력해주는 노드입니다. 타원은 노드를 의미하고, 사각형은 토픽을 의미합니다. 아래의 그림에서 2개의 노드 사이에 /turtle1/cmd_vel라는 토픽이 전달되는 형태입니다.
rosrun rqt_graph rqt_graph


'소프트웨어 > Jetson Xavier NX' 카테고리의 다른 글
| Jetson Xavier NX 보드에 JetPack 설치 #2 (0) | 2022.01.02 |
|---|---|
| Jetson Xavier NX 보드에 JetPack 설치 #1 (0) | 2022.01.02 |
| Jetson Xavier NX 보드에 vscode 설치 (0) | 2021.12.08 |
| Jetson Xavier NX - ROS 설치를 위한 환경구성 (0) | 2021.12.06 |
| Jetson Xavier NX 보드 환경구성 (0) | 2021.12.06 |
