728x90
728x90
1. Cartographer ROS를 설치하기 위해서는 wstool, rosdep, Ninja를 먼저 설치해야 합니다.
먼저 업데이트를 실행합니다.
sudo apt-get update

2. 아래의 명령어를 실행하여 cartographer를 설치합니다.
sudo apt install ros-melodic-cartographer-ros




3. 설정 내용을 적용하기 위해 아래의 명령을 실행합니다.
source /opt/ros/melodic/setup.bash
4. 설치한 Cartographer의 정상 동작을 확인하기 위해 데모용 backpack 파일을 다운로드 합니다.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
4. 다운로드 받은 backpack 파일을 실행하기 위해 패키지를 데모 백팩 패키지를 사용합니다.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
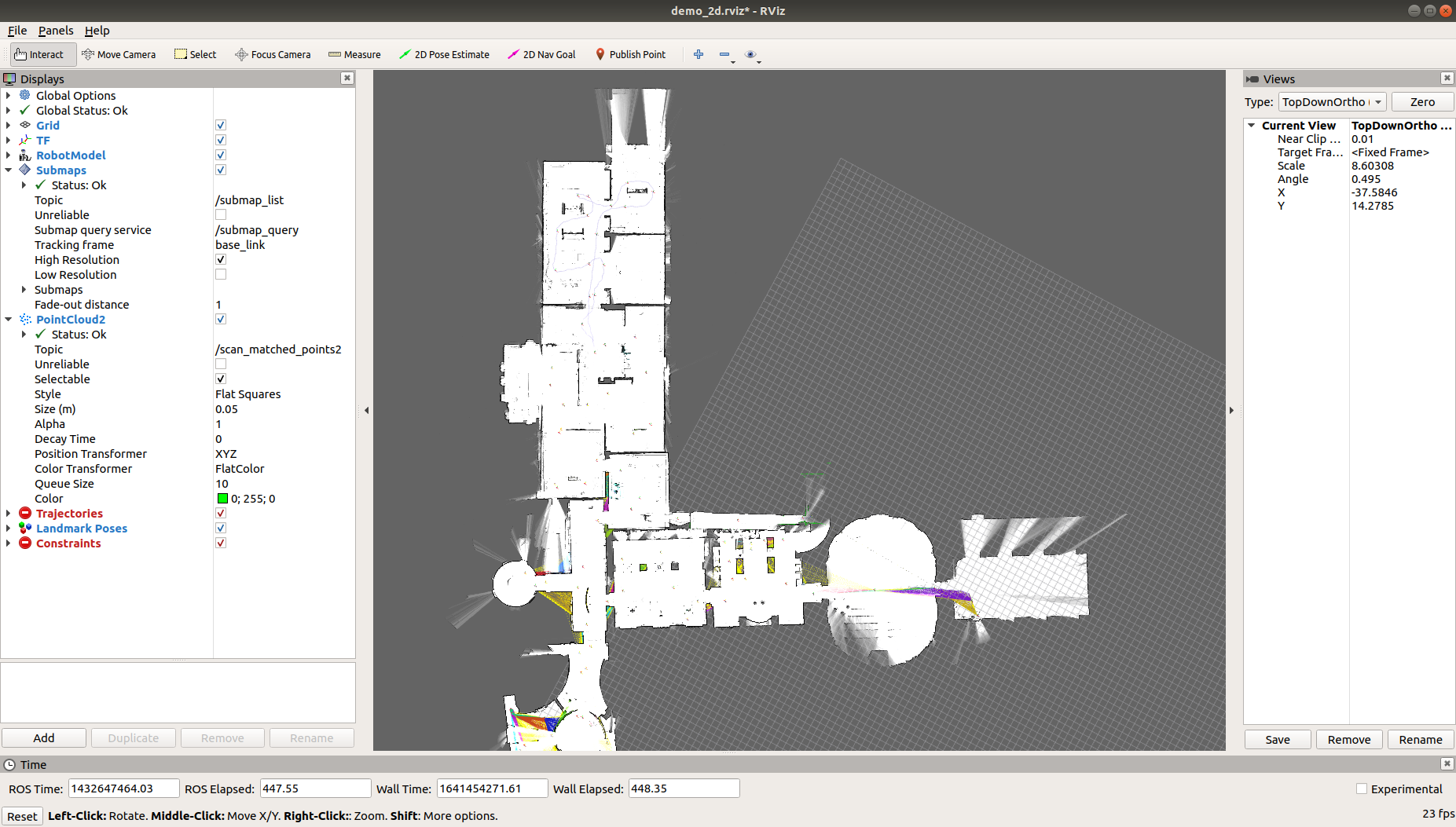
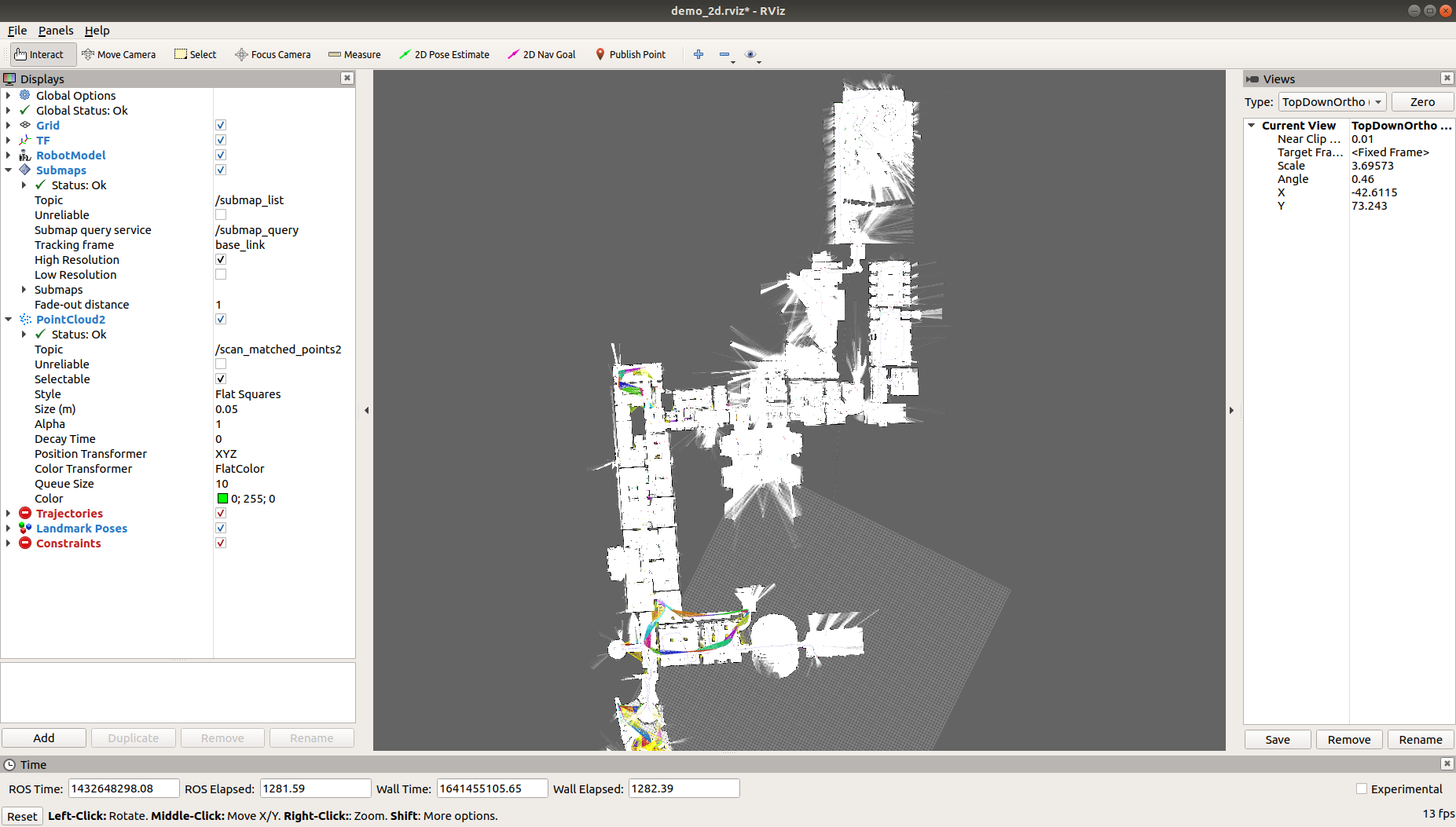
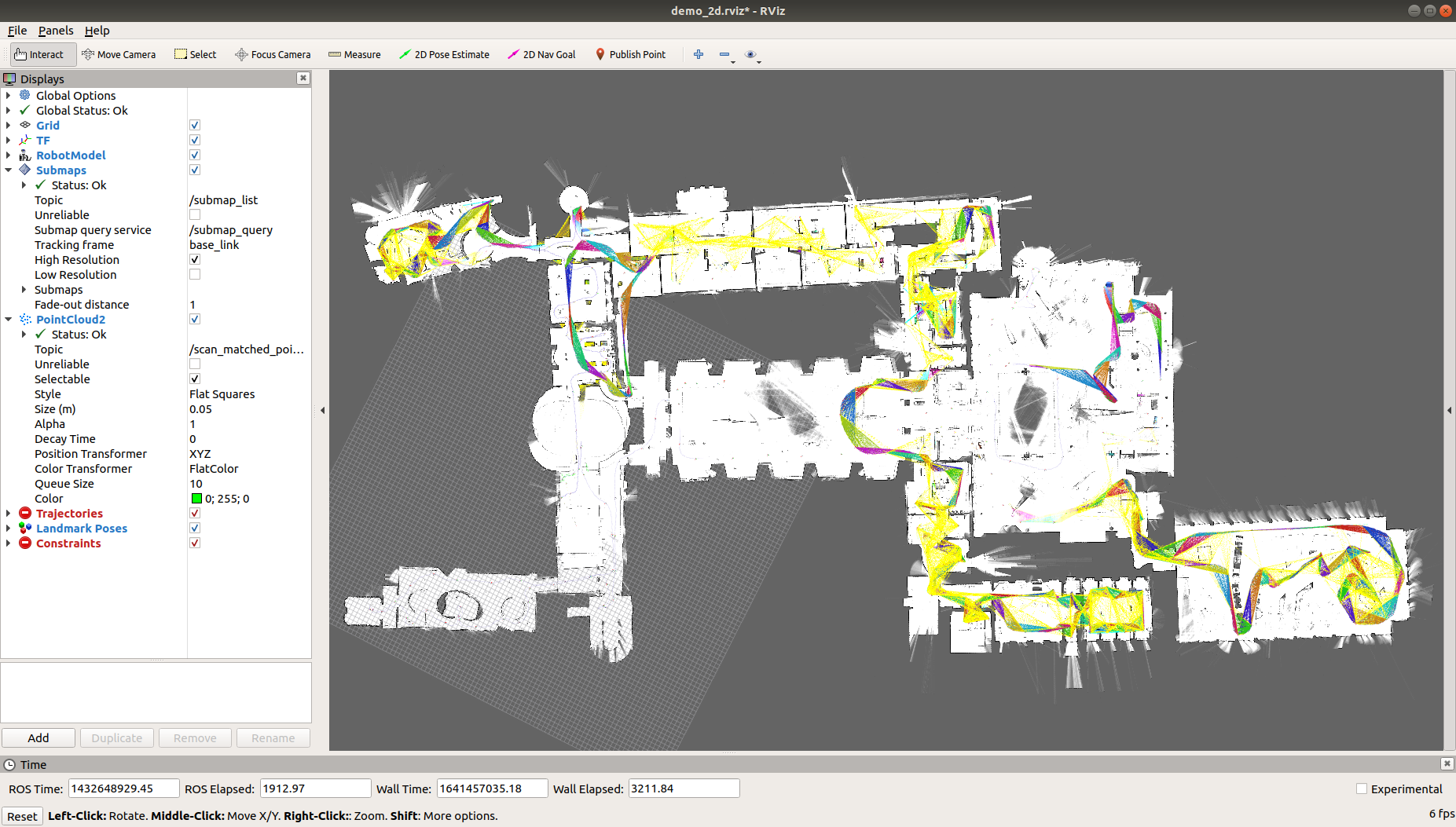
6. 아래의 그림은 RVIZ 실행 결과를 나타내는 그림들입니다. 시간이 지남에 따라 맵이 생성되는 것을 확인할 수 있습니다. Gridmap에 비해 외곽선이 간결하고 비교적 깨끗한 맵이 작성됨을 확인할 수 있습니다.




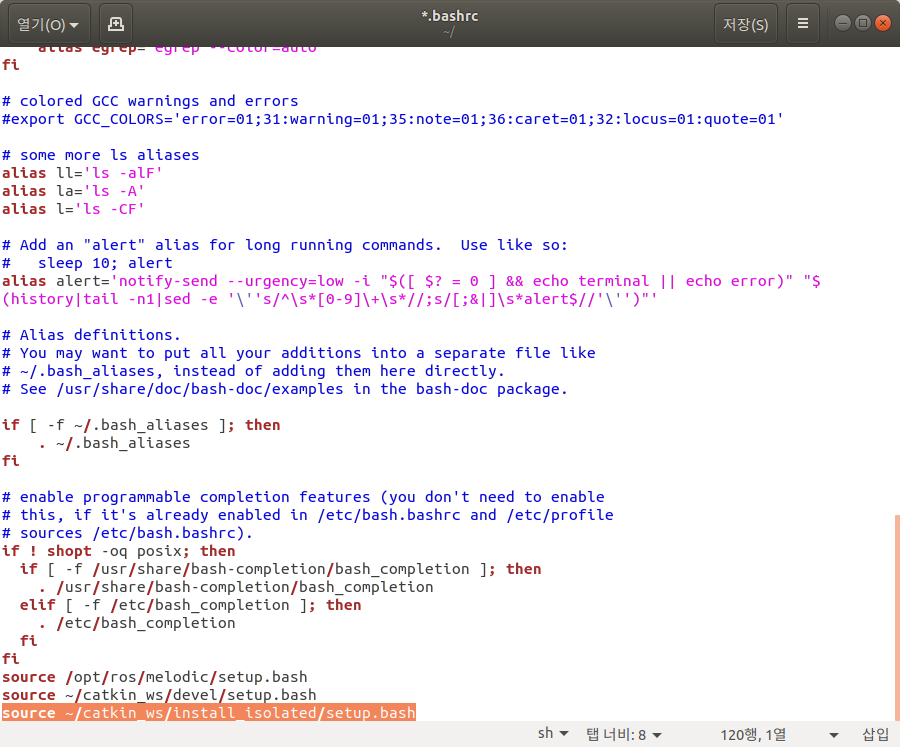
7. cartogrpher의 설치 내용을 터미널 실행시 적용하기 위해서는 .bashrc 파일에 setup.bash 실행 내용을 추가해야 합니다.
cd ~/
gedit .bashrc

gedit를 선택하시고 작성된 내용의 맨 아래로 이동하셔서 아래의 내용을 추가하시기 바랍니다.
source ~/catkin_ws/install_isolated/setup.bash
내용 수정이 완료되었으면 저장을 하고 종료합니다. 터미널을 새롭게 실행하고 정상적인 동작여부를 확인합니다.
728x90
728x90
'소프트웨어 > ROS' 카테고리의 다른 글
| Zetabank Robot Setting #2 (0) | 2022.01.06 |
|---|---|
| 서비스 로봇 : ROS 기반 자율주행 환경 구축 (0) | 2022.01.06 |
| Cartographer 컴파일 및 설치 : ROS Melodic #1 (3) | 2021.12.30 |
| Ubuntu 18.04에 yaml-cpp 설치 (0) | 2021.12.12 |
| Arduino에서 ROS 사용 (0) | 2019.02.01 |
