1. 로보티즈에서 판매하고 있는 LDS-01 거리 측정 센서의 ROS 패키지를 설치합니다. 아래의 사이트는 온라인 매뉴얼을 제공합니다. 참고하시기 바랍니다.
https://emanual.robotis.com/docs/en/platform/turtlebot3/appendix_lds_01/
ROBOTIS e-Manual
emanual.robotis.com
2. ROS Melodic 환경에서 아래의 명령어를 실행하여 LDS 센서의 ROS 패키지를 설치합니다.
sudo apt-get install ros-melodic-hls-lfcd-lds-driver
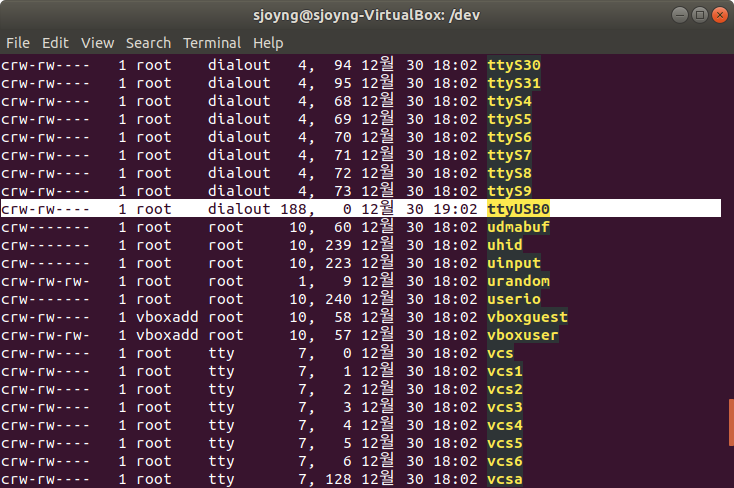
3. 거리 측정센서를 USBtoSerial 케이블로 연결하고 /dev에서 해당 장치가 마운트 되어 있는지 확인합니다.
4. 아래의 명령어를 실행하여 통신 장치의 쓰기 속성을 추가합니다.


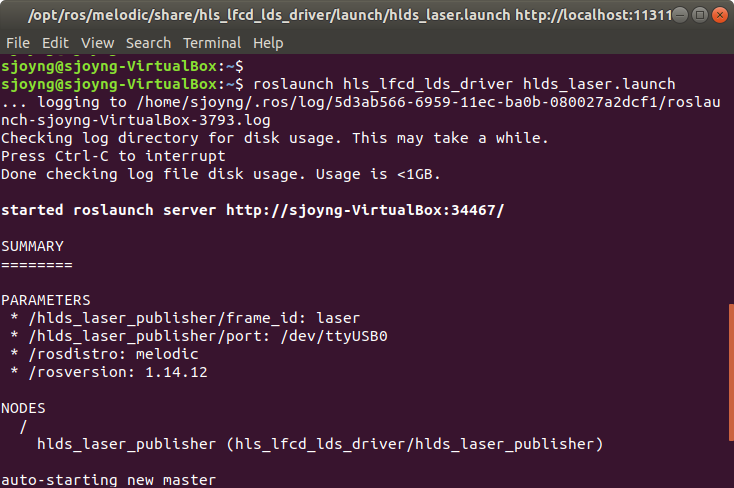
5. 장치 설정이 완료되면 거리 측정 센서의 노드를 실행합니다.
roslaunch hls_lfcd_lds_driver hlds_laser.launch

6. 거리 측정 센서 데이터가 정상적으로 취득되는지 확인하기 위해 RVIZ viewer를 실행합니다. 위의 노드가 실행될 경우 강제로 노드 정지가 실행되기 때문에 노드 실행 명령어를 중지하고 RVIZ 뷰어를 실행합니다.
roslaunch hls_lfcd_lds_driver view_hlds_laser.launch


7. 아래의 그림은 RVIZ 실행화면입니다.

728x90
728x90
'로봇개발 > 센서 데이터 처리' 카테고리의 다른 글
| TF-Luna LiDAR Module (0) | 2022.01.07 |
|---|---|
| Maxbotix LV-maxSonar, 초음파 센서 (0) | 2022.01.05 |
| IMU – GY-87(MPU-6050 + HMC5883L + MBP180) (0) | 2022.01.05 |
| IMU – WT901C RS232 (0) | 2022.01.05 |
| Jetson Xavier NX : LDRobot의 DOF LiDAR LD06 (2) | 2022.01.04 |
