1. 아래의 링크에 접속하여 제품에 대한 각종 데이터를 참조합니다. 산업용으로 출시된 제품으로 케이스로 구성된 IMU 센서 제품입니다.
(제품홈페이지 : https://www.wit-motion.com/digital-inclinometer/witmotion-wt901c-rs232-9-axis-imu.html)
WitMotion WT901C RS232 9 Axis IMU Sensor Tilt Angle Roll Pitch Yaw + Acceleration + Gyroscope + Magnetometer M
Highlights WT901C’s scientific name is the AHRS IMU sensor. A sensor measures 3-axis angle, angular velocity, acceleration, magnetic field. WitMotion WT901C integrates a high-precision gyroscope, accelerometer, and geomagnetic field sensor, and adopts a
www.wit-motion.com

위 사이트의 하단부에 보시면 Download Center가 있습니다.
현재는 파일을 제공하지 않고 있습니다.
아래의 파일을 사용하시기 바랍니다.
[다운로드 파일] :
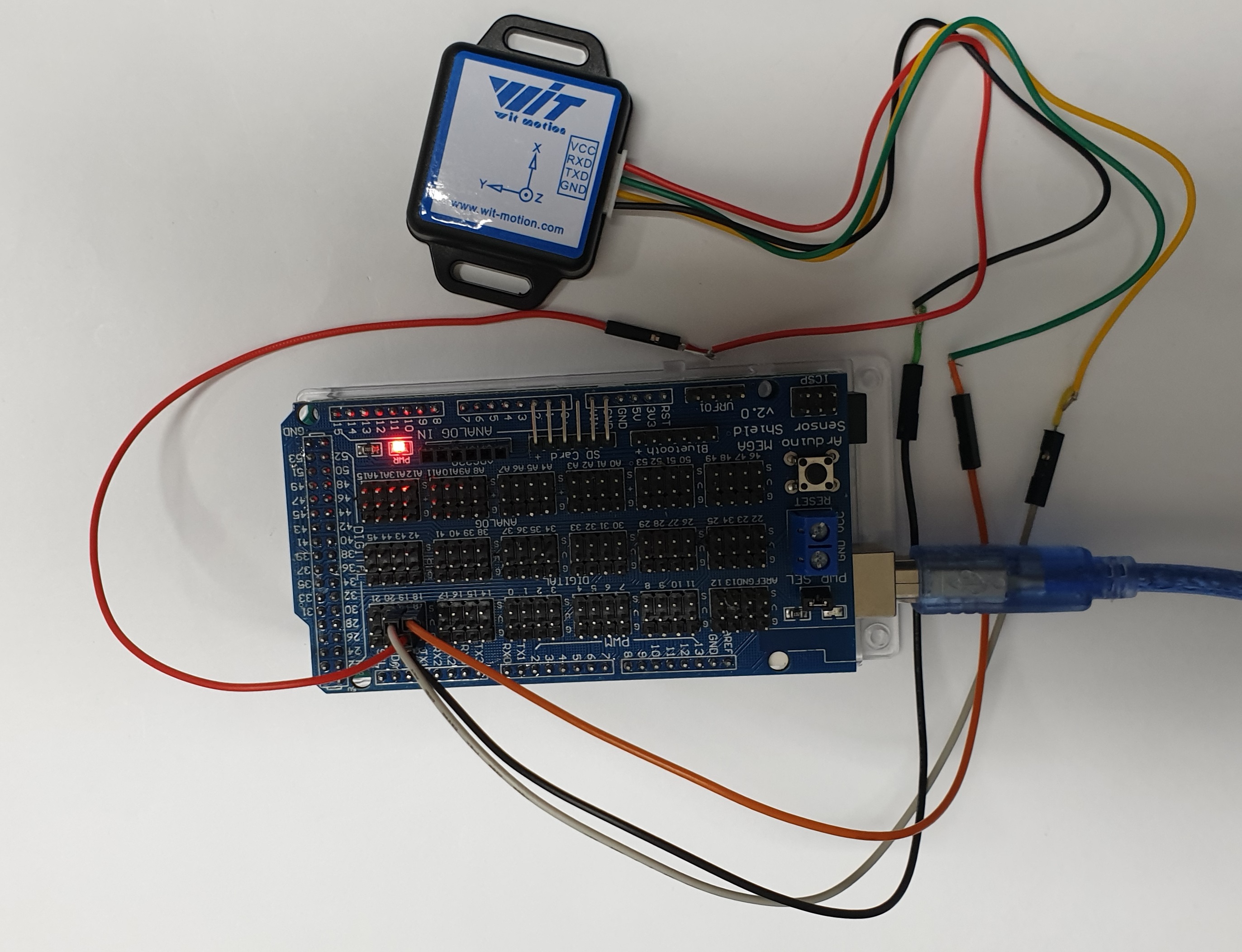
2. 아래의 그림과 같이 Arduino sensor shield 보드의 UART 포트에 연결합니다. 아래의 그림에서 사용한 보드는 Arduino MEga와 Sensor Shield 보드를 결합한 것입니다.
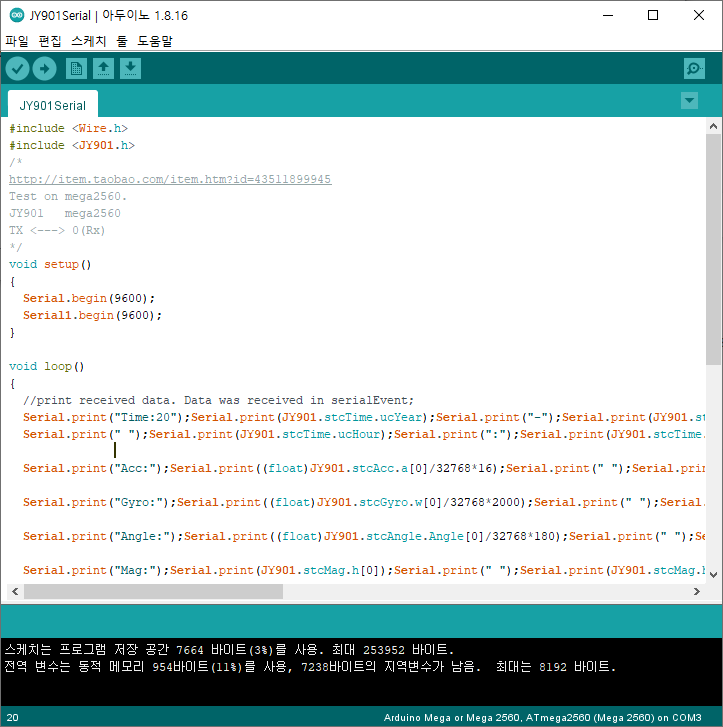
3. 스케치에서 IMU 제품의 데이터를 취득할 수 있도록 프로그램을 작성합니다.
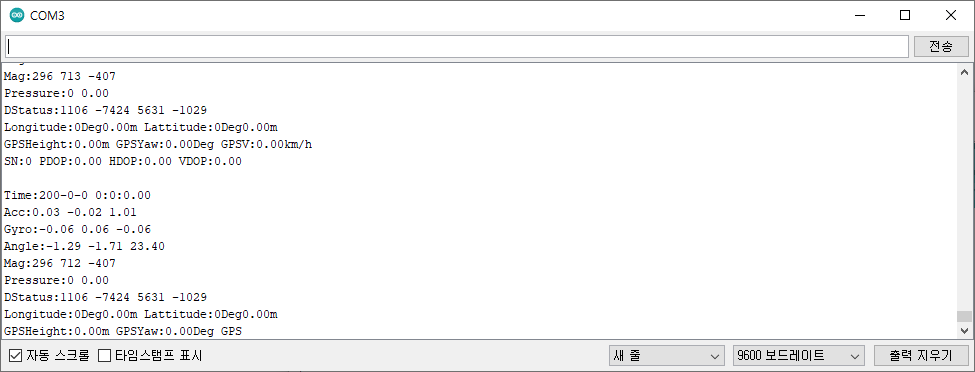
4. ART 통신 터미널을 실행하여 센서 데이터의 취득여부와 동작상태를 확인합니다.
'로봇개발 > 센서 데이터 처리' 카테고리의 다른 글
| TF-Luna LiDAR Module (0) | 2022.01.07 |
|---|---|
| Maxbotix LV-maxSonar, 초음파 센서 (0) | 2022.01.05 |
| IMU – GY-87(MPU-6050 + HMC5883L + MBP180) (0) | 2022.01.05 |
| Jetson Xavier NX : LDRobot의 DOF LiDAR LD06 (2) | 2022.01.04 |
| ROS Liadar 패키지 설치 : ROBOTIS LDS-01 (0) | 2021.12.30 |
