이번에는 /turtle1/cmd_vel 토픽으로 속도 명령을 발행하여 거북이를 움직입니다.
turtlesim에서 거북이를 움직이는 토픽은 다음과 같습니다.
/turtle1/cmd_vel
메시지 타입은 다음과 같습니다.
geometry_msgs/msg/Twist
확인은 다음 명령으로 할 수 있습니다.
ros2 topic list -t
1. 필요한 모듈 import
Twist 메시지는 선속도와 각속도를 표현하는 메시지입니다.
구조는 크게 두 부분입니다.
linear
angular
각각은 다시 x, y, z 값을 가집니다.
linear.x
linear.y
linear.z
angular.x
angular.y
angular.z
turtlesim에서는 주로 아래 두 값을 사용합니다.
msg.linear.x
msg.angular.z

import rclpy as rp
from geometry_msgs.msg import Twist

2. 노드 생성
rp.init()
test_node = rp.create_node('pub_test')
여기서 pub_test는 토픽을 발행하는 노드 이름입니다.

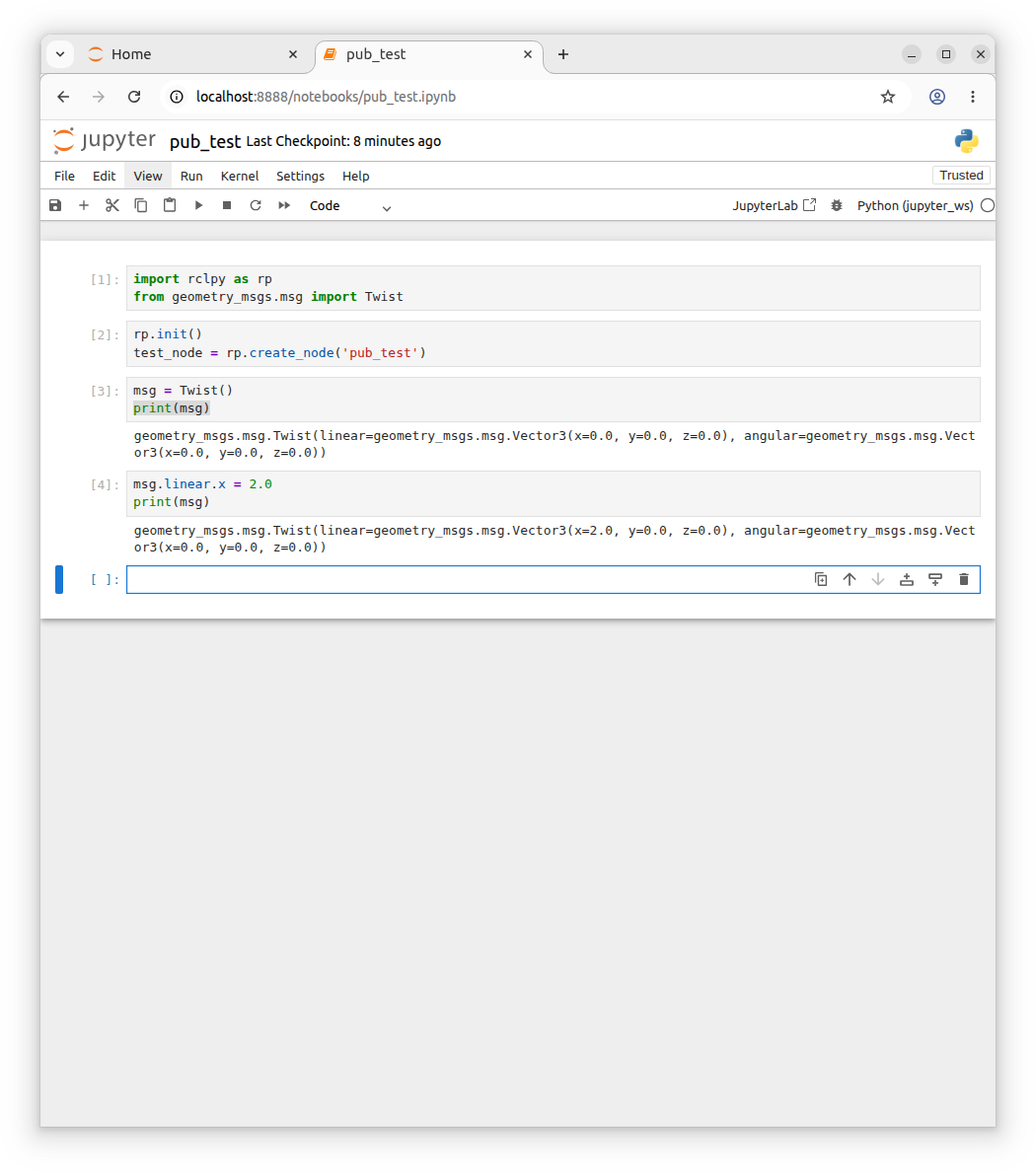
3. Twist 메시지 객체 생성
msg = Twist()
print(msg)

초기 상태의 Twist 메시지는 모든 값이 0.0입니다.
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
거북이를 앞으로 움직이려면 linear.x 값을 수정합니다.
msg.linear.x = 2.0
print(msg)
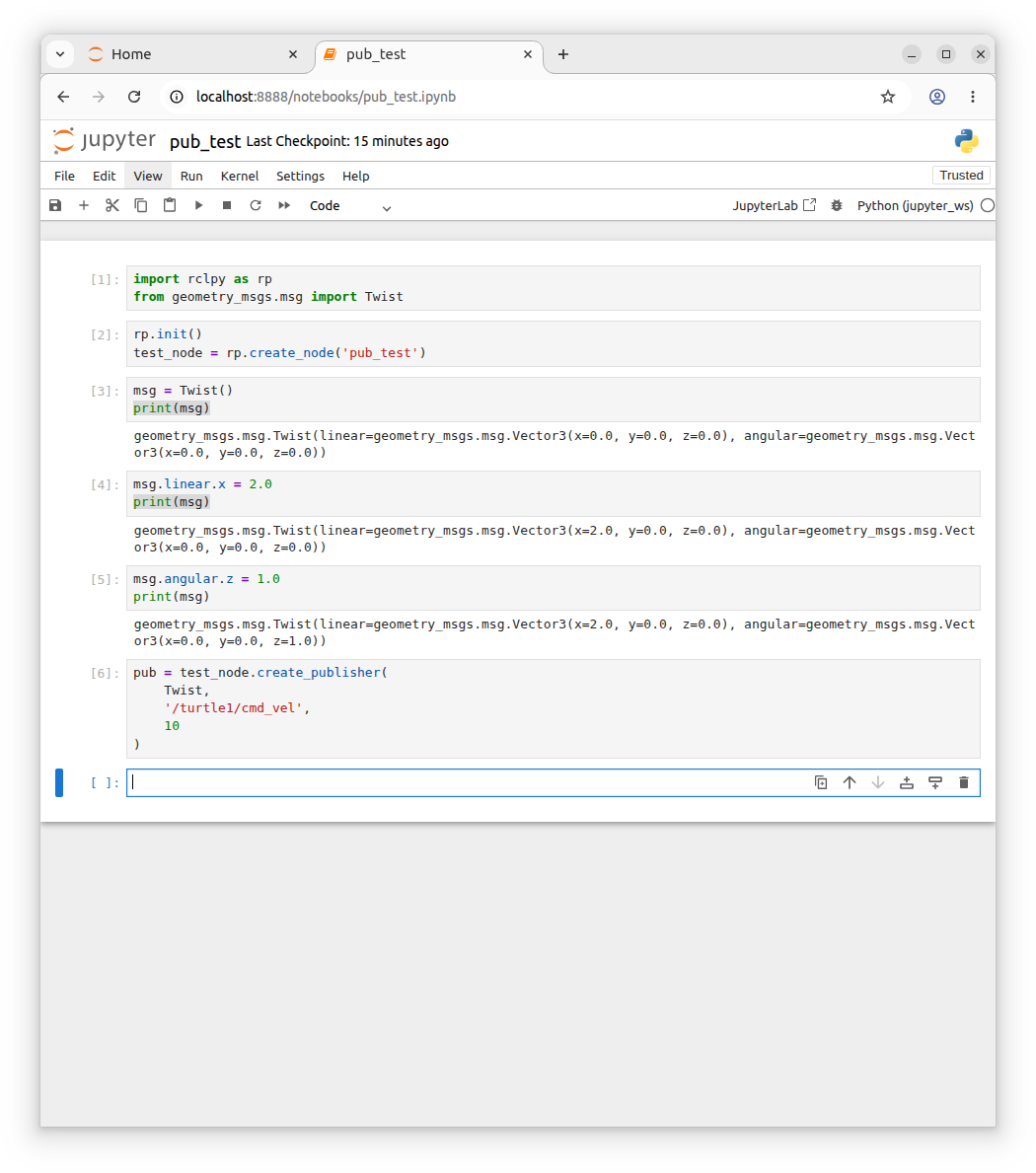
회전시키려면 angular.z 값을 수정합니다.
msg.angular.z = 1.0
print(msg)

4. Publisher 생성과 발행
a. Publisher 생성
pub = test_node.create_publisher(
Twist,
'/turtle1/cmd_vel',
10
)
구조는 다음과 같습니다.
node.create_publisher(메시지타입, 토픽이름, QoS)각 항목의 의미는 다음과 같습니다.
| Twist | 발행할 메시지 타입 |
| /turtle1/cmd_vel | 발행할 토픽 이름 |
| 10 | QoS queue depth |
b. 메시지 한 번 발행하기
pub.publish(msg)
위 코드를 실행하면 거북이가 한 번 움직입니다.

전체 코드는 다음과 같습니다.
import rclpy as rp
from geometry_msgs.msg import Twist
rp.init()
test_node = rp.create_node('pub_test')
msg = Twist()
msg.linear.x = 2.0
pub = test_node.create_publisher(
Twist,
'/turtle1/cmd_vel',
10
)
pub.publish(msg)


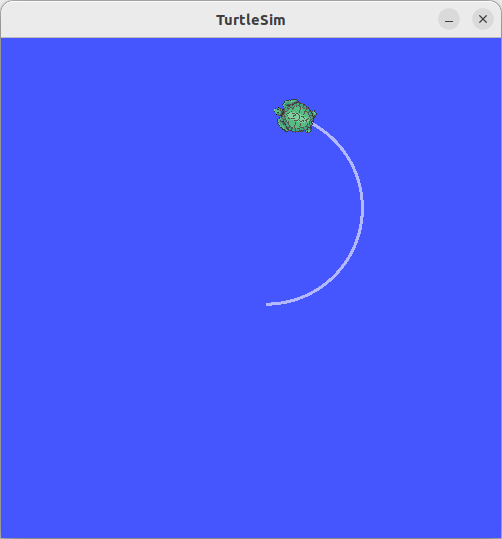
5. 직진과 회전을 함께 명령하기
거북이를 앞으로 이동시키면서 회전시키려면 다음과 같이 작성합니다.
msg.linear.x = 2.0
msg.angular.z = 1.0
pub.publish(msg)


이렇게 하면 거북이가 원호를 그리며 움직입니다.
값을 바꾸면 움직임도 달라집니다.
| linear.x > 0 | 전진 |
| linear.x < 0 | 후진 |
| angular.z > 0 | 반시계 방향 회전 |
| angular.z < 0 | 시계 방향 회전 |
| linear.x = 0, angular.z ≠ 0 | 제자리 회전 |
6. Timer로 주기적으로 토픽 발행하기
a. Timer가 필요한 이유
한 번만 publish()를 실행하면 거북이는 짧게만 움직입니다.
지속적으로 움직이게 하려면 일정 주기로 메시지를 계속 발행해야 합니다.
ROS 2에서는 이를 위해 timer를 사용합니다.
test_node.create_timer(timer_period, timer_callback)
timer_period는 몇 초마다 실행할지를 의미합니다.
예를 들어 timer_callback이 0.1이면 0.1초마다 callback이 실행됩니다.
b. Timer callback 작성
cnt = 0
def timer_callback():
global cnt
cnt += 1
print(cnt)
pub.publish(msg)
if cnt > 3:
raise Exception("Publisher Stop")
이 코드는 timer가 실행될 때마다 다음 동작을 수행합니다.
- cnt 값을 증가시킵니다.
- 현재 횟수를 출력합니다.
- /turtle1/cmd_vel로 msg를 발행합니다.
- 4번째 실행 이후 예외를 발생시켜 멈춥니다.
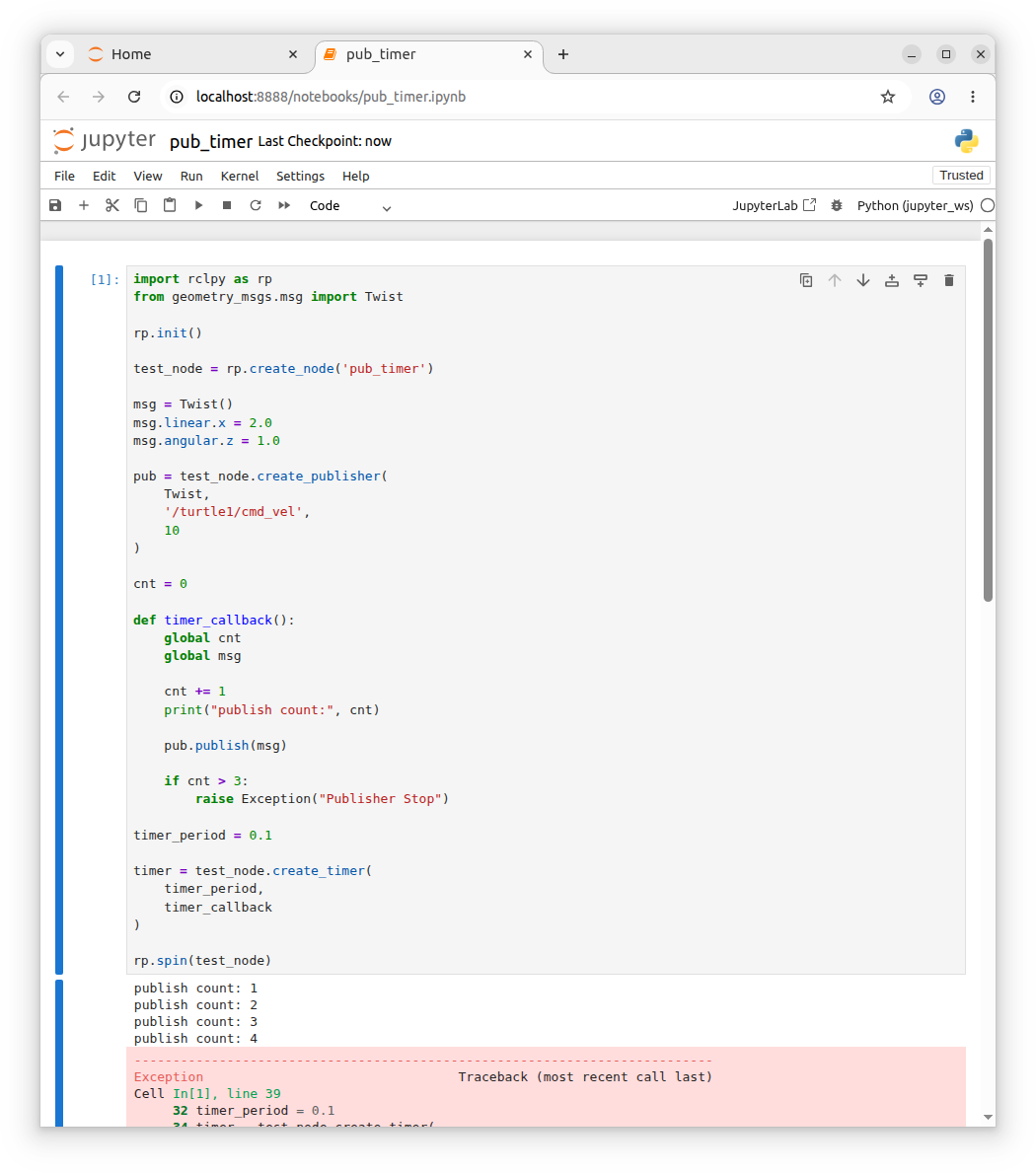
c. Timer 전체 코드
import rclpy as rp
from geometry_msgs.msg import Twist
rp.init()
test_node = rp.create_node('pub_test')
msg = Twist()
msg.linear.x = 2.0
msg.angular.z = 1.0
pub = test_node.create_publisher(
Twist,
'/turtle1/cmd_vel',
10
)
cnt = 0
def timer_callback():
global cnt
cnt += 1
print("publish count:", cnt)
pub.publish(msg)
if cnt > 3:
raise Exception("Publisher Stop")
timer_period = 0.1
timer = test_node.create_timer(
timer_period,
timer_callback
)
rp.spin(test_node)

7. 실무형 개선 코드
강의에서는 위 예제가 직관적입니다.
실무형 코드에서는 예외로 종료하는 대신, 일정 횟수 발행 후 안전하게 종료하는 구조입니다.
import rclpy
from geometry_msgs.msg import Twist
def main():
rclpy.init()
node = rclpy.create_node('safe_pub_test')
publisher = node.create_publisher(
Twist,
'/turtle1/cmd_vel',
10
)
msg = Twist()
msg.linear.x = 2.0
msg.angular.z = 1.0
count = {'value': 0}
def timer_callback():
count['value'] += 1
node.get_logger().info(f"publish count: {count['value']}")
publisher.publish(msg)
if count['value'] >= 10:
node.get_logger().info("Publishing finished.")
node.destroy_timer(timer)
node.destroy_node()
rclpy.shutdown()
timer = node.create_timer(0.1, timer_callback)
rclpy.spin(node)
if __name__ == '__main__':
main()
count = {'value': 0} 는 타이머 콜백 함수 안에서 값을 계속 증가시키기 위해 만든 카운터 변수입니다.
여기서 count는 정수 변수가 아니라 딕셔너리입니다.
{
'value': 0
}즉, count 안에 "value"라는 이름의 값이 있고, 초기값은 0입니다.
딕셔너리로 썼냐면, Python의 함수 스코프 때문입니다.
예를 들어 이렇게 쓰면 문제가 생깁니다.
count = 0
def timer_callback():
count += 1이 코드는 에러가 납니다.
UnboundLocalError: local variable 'count' referenced before assignment왜냐하면 함수 안에서 count += 1을 쓰는 순간, Python은 count를 함수 내부 지역 변수로 판단하기 때문입니다.
그래서 바깥의 count = 0을 제대로 수정하지 못합니다.
현재 코드 방식처럼 사용하면
count = {'value': 0}
def timer_callback():
count['value'] += 1딕셔너리 자체는 바깥에 있고, 함수 안에서는 딕셔너리 안의 값만 바꾸는 것이므로 정상 동작합니다.
이 코드는 블로그 독자에게 더 좋은 예제입니다.
이유는 다음과 같습니다.
| raise Exception()으로 종료 | destroy_node()와 shutdown() 사용 |
| Jupyter 실습에 적합 | ROS 2 패키지 코드에 적합 |
| 빠르게 결과 확인 가능 | 구조가 안정적 |
| 디버깅용 | 실제 프로젝트용 |

8. 노드 종료 정리
ROS 2에서 노드를 만들었으면 사용 후 종료하는 습관이 중요합니다.
test_node.destroy_node()
rp.shutdown()
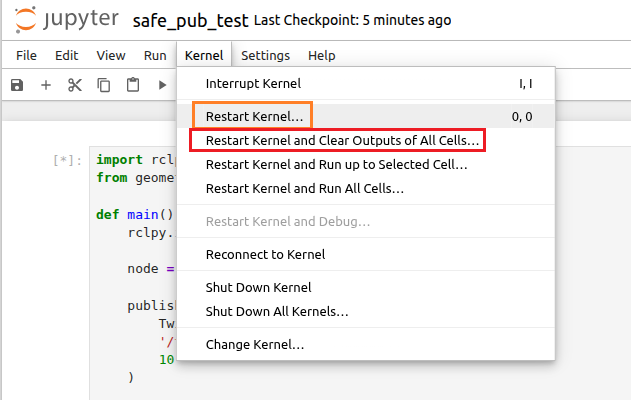
Jupyter에서는 kernel이 살아 있으면 이전 노드 정보가 남아 보일 수 있습니다.
이 경우 다음 메뉴를 사용합니다.
Kernel → Restart
또는 완전 초기화를 위해 다음을 선택합니다.
Kernel → Restart & Clear Output
'강좌 > ROS2' 카테고리의 다른 글
| ROS2 패키지 만들고 토픽 다루기 (0) | 2026.05.08 |
|---|---|
| ROS 2 Python Service Client 사용하기 (0) | 2026.05.08 |
| Python에서 ROS2 토픽 구독 (0) | 2026.05.07 |
| Ubuntu 22.04에서 Jupyter 설치하기 (0) | 2026.05.06 |
| ROS2 파라미터 (0) | 2026.05.06 |
